

















ROBO TX ElectroPneumatic
COMPUTING
7
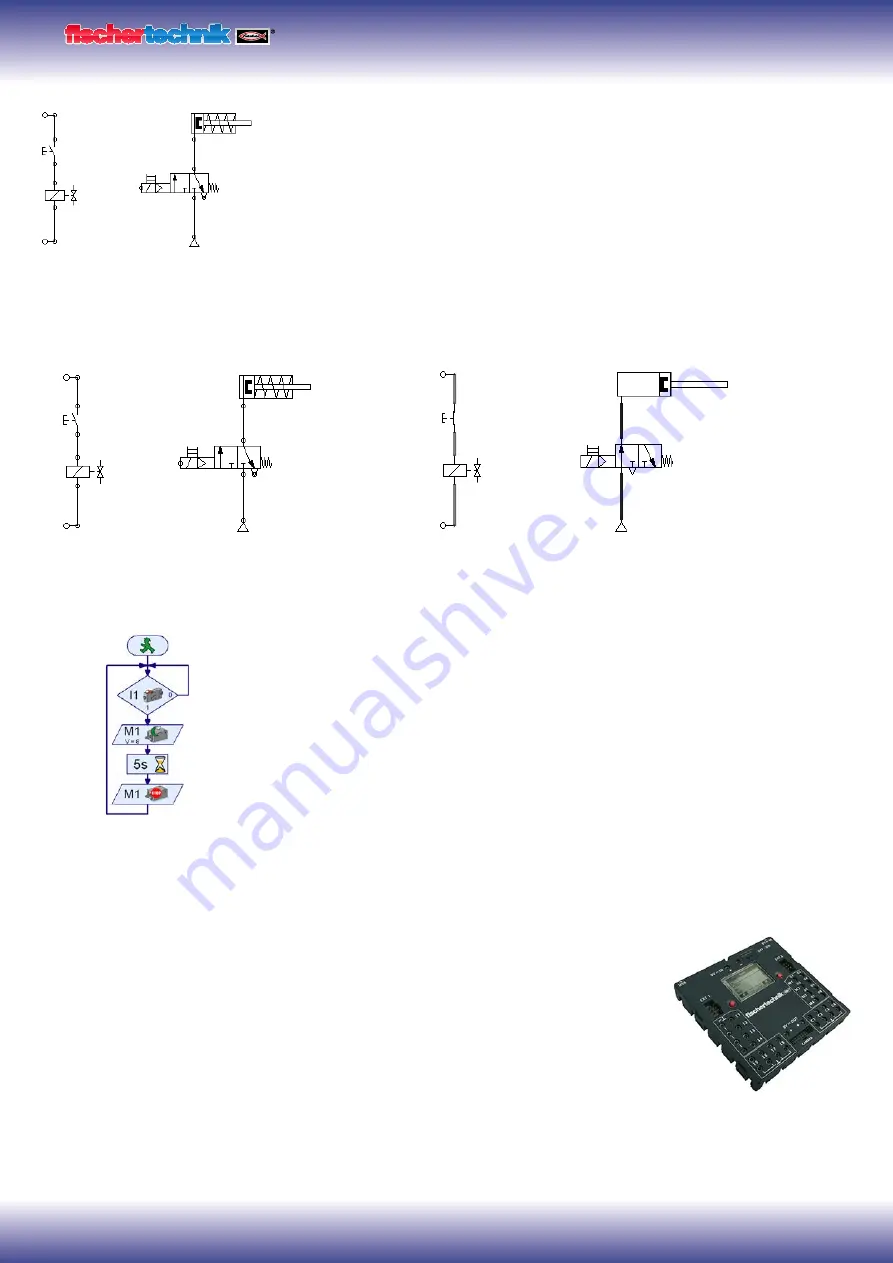
In the illustration the electrical part is on the left and the pneumatic stage on the right.
The electrical part consists of a +9V power source, a pushbutton and the valve coil
(electromagnet). The pneumatic stage consists of the compressed air source, the valve
and the cylinder.
Note:
Since the magnetic coil and valve form one unit, they are shown using the same sym-
bol. This clearly shows that the coil and valve belong together.
The two figures below show the circuit in the non-actuated state, in the figure on the
right with the button pressed. The figure on the right clearly shows the flow of electric-
ity as well as air.
ROBO Pro control software
Control logic with ROBO Pro software and ROBO TX Controller
In addition to its mechanical construction, the unit requires the control logic, software
for the PC and an interface ( ROBO TX Controller) to convert the software commands
into signals which the machine can execute.
The ROBO Pro control software has a simple graphical programming interface which
allows you to create programs without having to learn a programming language.
For the ROBO TX ElectroPneumatic construction set you need ROBO Pro version
3.1.3 or higher. If you have an older version of the software, it will be automatically
updated when you install the ROBO TX ElectroPneumatic CD.
ROBO TX Controller
The ROBO TX Controller is the most important component in the model. It controls
the actuators (motors, lights & valves) and evaluates information from the sen-
sors. For this purpose the ROBO TX Controller has numerous connections
for connection to the components. The instruction manual for the ROBO
TX Controller describes which components can be connected to which con-
nections and the functions of the connections.
A special feature is the integrated Bluetooth interface. It allows you to complete a
wireless link between your PC and the ROBO TX Controller. Or to connect a number
of controllers with one another. You can define how the controller interacts with the
individual components and what they are to do in detail in the program you write with the ROBO Pro
software.
+9V
T1
V1
V1
0V
A1
A
P R
Circuit diagram - electrical, pneumatic stage
+9V
T1
V1
V1
0V
A1
A
P
R
+9V
T1
V1
V1
0V
A1
A
P
R
Circuit diagram - non-actuated position
Circuit diagram - button pressed
Program example with
symbolic commands
Содержание COMPUTING ROBO TX ElectroPneumatic
Страница 1: ......
Страница 18: ...ElectroPneumatic ElectroPneumatic ...





















































