

















ROBO TX ElectroPneumatic
COMPUTING
13
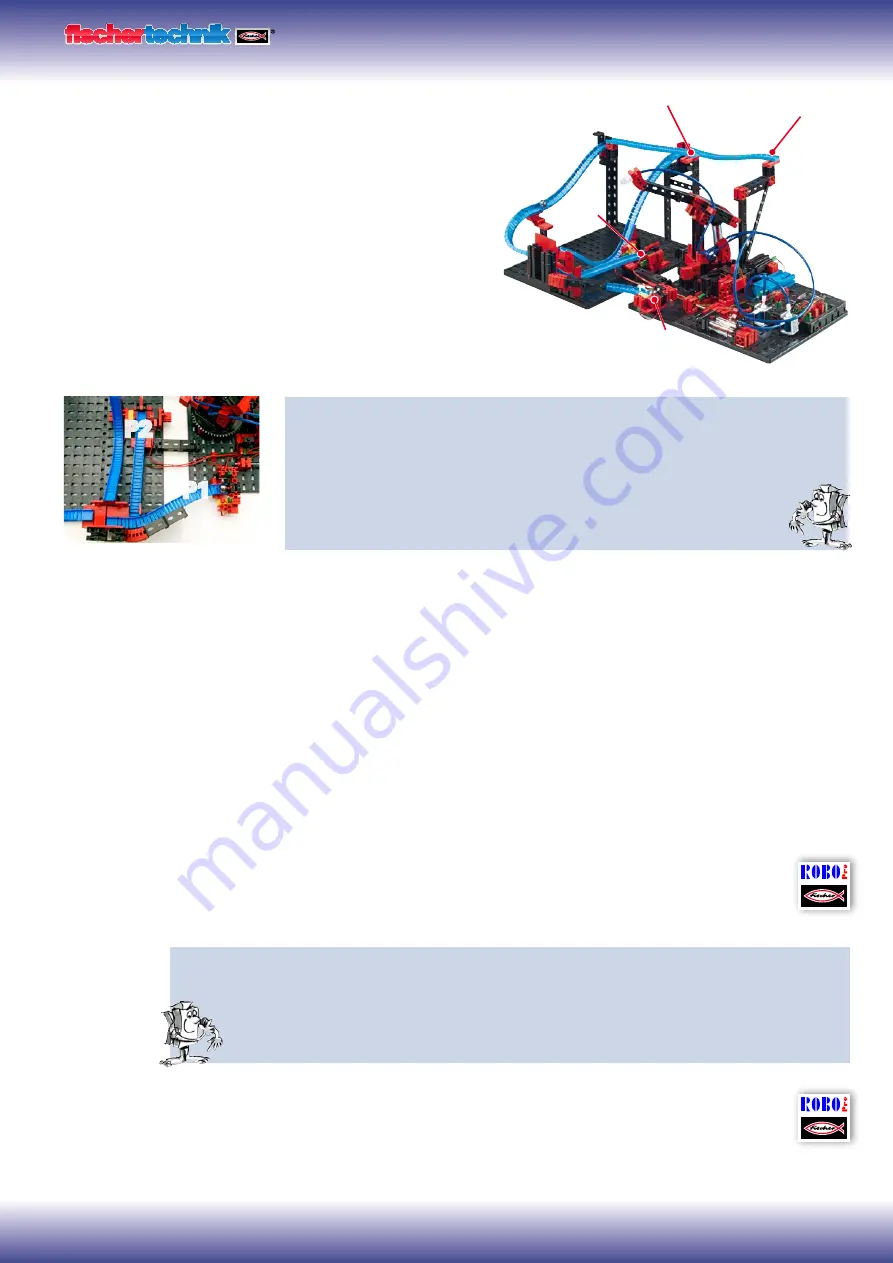
Ball obstacle course
with vacuum picker arm
With this model the vacuum picker arm automati-
cally returns balls from the end to the start of an
obstacle course. Build the model according to
the assembly instructions and wire the electrical
and pneumatic components according to the
circuit diagram. During assembly pay attention to
accuracy when installing the parts, connecting the hoses
and wiring the electrical components. This eliminates the need for
trouble-shooting when you put the model into operation.
Task 1 - Return a ball - ROBO Pro Level 2
A ball is to be returned at one of the two ends of obstacle course P1 or P2 by the
vacuum picker arm. The two light barriers are checked to determine where the ball
is located. After picking up, the ball is transported to position 3 on the obstacle
course and put down. The ball rolls to the gate where it is guided to one of
the two final paths. The program is intended to run as a continuous loop.
Tips
As with the previous programming tasks, it is necessary to consider the sequence you want. Also con-
sider which parts of the program will need to be written in a subprogram.
Switch on the compressor and lens tip lamps for the light barriers (2 sec. time delay)
▯
Start the model and position the robot arm at the start position - Check sensor I1, motor direction of
▯
rotation: Counterclockwise
Check the two light barriers
▯
Pick up the balls
▯
Transport to set-down location P3 and set down balls - pulse counter
▯
Return to light barrier check to see if new balls are present
▯
You can call a finished example program for this task with this symbol.
Task 2 - Both obstacle courses - ROBO Pro Level 2
The light barrier check tells the robot where a ball is located so that the robot can transport the ball
to the start of the track. If the ball is at the end of the front track (P1), it should be put down at
position P3. If the ball is at the end of the rear track (P2), it should be put down at position P4.
You can call a finished example program for this task with this symbol.
Ends of obstacle courses
P2
P1
ball obstacle course_1.rpp
ball obstacle course_2.rpp
P3
P4
P2
P1
Содержание COMPUTING ROBO TX ElectroPneumatic
Страница 1: ......
Страница 18: ...ElectroPneumatic ElectroPneumatic ...


































































