





























3
Commissioning
28
Festo – EXCM-30/-40-...-PF-EN – 1603 – English
3.2.5
Switch-off functions interface [X4]
The safety function STO (“Safe Torque Off ”) is described in detail in the document “CMXH
description STO” and may only be used in the manner described there.
(
è
Tab. 1.2 Documentation for the system EXCM-30/-40 with CMXH)
To establish ready status, the circuitry of the control inputs STO1/STO2 and ESTOP with +24 V at [X4]
are required. If the safety function STO is not needed, a suitable circuitry of the control inputs
STO1/STO2 is required for operation of the controller.
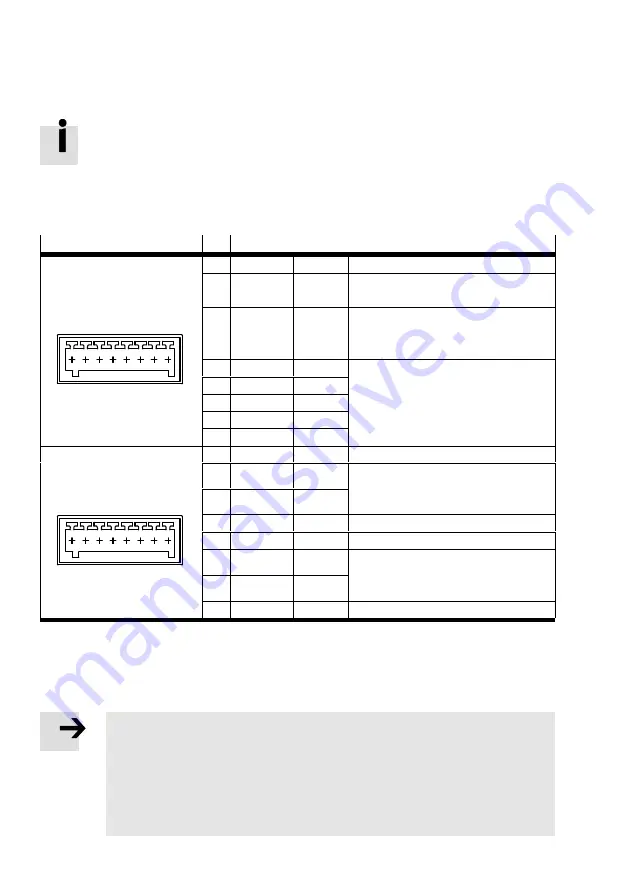
Connection X4
Pin Function
Top row
16
24 V logic
Output
Logic v24 V
16
9
15
ESTOP
Input
External stop
With 0 V: trigger braking ramp
14
Input
With +24 V: release brake
With 0 V: Brake control via the control
word CCON
13
–
Reserved
12
–
11
–
10
–
9
–
Bottom row
1
24 V logic
Output
Logic v24 V
8
1
2
STO1
Input
Safe Torque Off function:
With 0 V: Safely switch off supply
voltage to the motors
3
STO2
Input
4
–
Reserved
5
FAULT
Output
With +24 V: Fault is present
6
DIAG1
Potential-free diagnostic contacts
(Low impedance if the STO function
has been activated)
7
DIAG2
8
0 V GND
GND (reference potential)
1)
At rest, the output stage is switched off and any motor brakes present are closed.
2)
Detailed information about the brake function (
è
3)
If no controller has master control, the brake remains in its last status when 0 V is applied.
4)
The output is high impedance. To signal errors, a low impedance consumer should be used
Tab. 3.5
Switch-off functions interface [X4]
Note
The signal to release the brake always has priority. If a voltage of +24 V is applied to the
RB input (release brake), the brake is released permanently. In case of error (for errors
with error response “Output stage off ”), the brake remains released, as the signal for
releasing the brake is present:
– Leave the signal at “brake active” (0 V at the input RB).
– Manually release the brake only in a concrete case of need







































































