



Fig. 8 Toolbar for manual control of the adaptive shape gripper
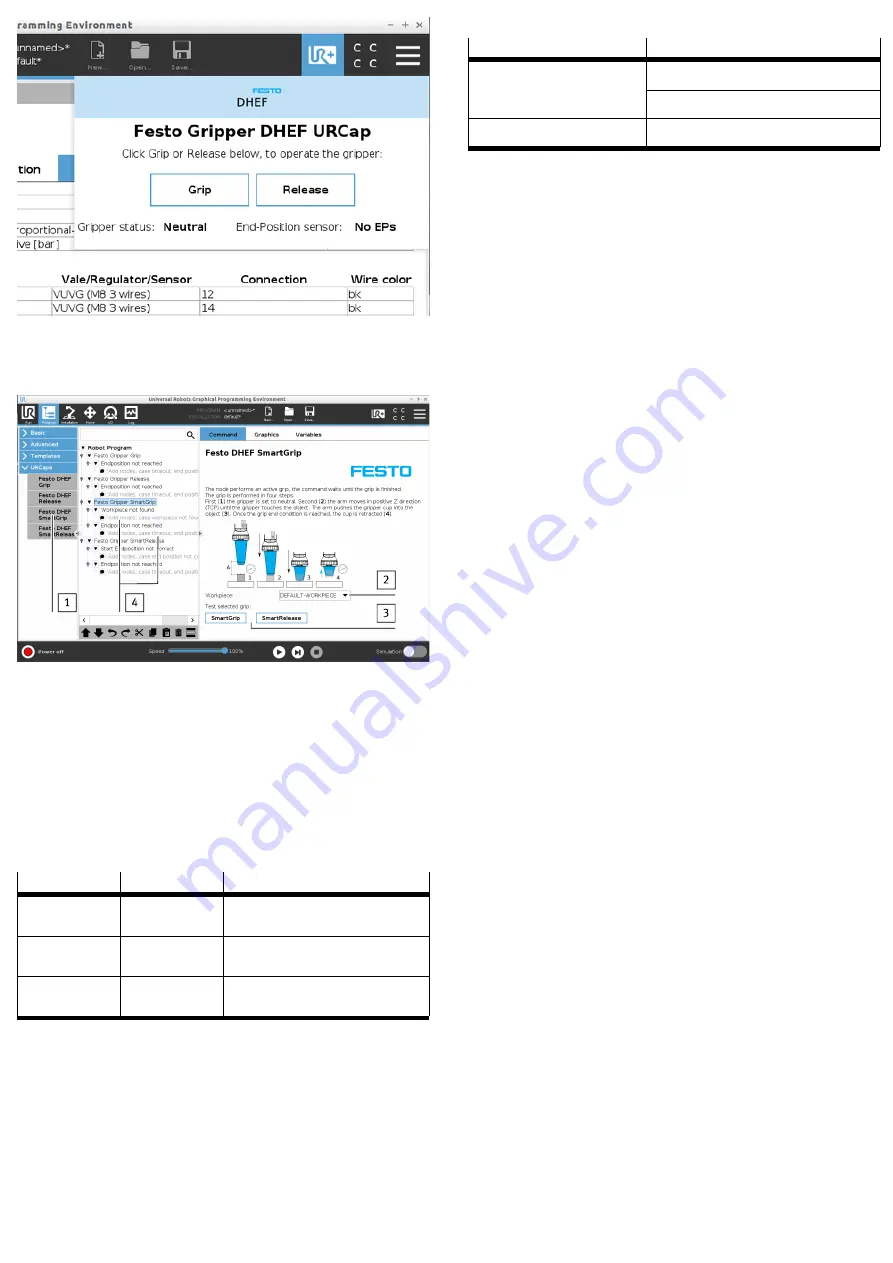
Integrating "SmartGrip"/"Grip" and "SmartRelease"/"Release" program com-
mands
Fig. 9 Integrating program commands
1. Position
1
"SmartGrip"/"Grip" and "SmartRelease"/"Release" anywhere in
the program.
2. Workpiece selection
2
.
3. The functions of the adaptive shape gripper can be manually
3
tested.
4. Gripping result successful/faulty
4
Ä
Option for inserting additional program commands.
7
Clean product
•
Clean the outside of the product with a soft cloth as required. Cleaning agents
include all non-abrasive media.
8
Fault clearance
Malfunction
Possible cause
Remedy
Frequent collision of
the robot
Exchange the "DO
grip" and "DO release"
allocation
Check setting and cabling
Object is not held after
the cap is retracted
Exchange the "DO
grip" and "DO release"
allocation
Check setting and cabling
Program sequence is
interrupted
Start and end condi-
tions of the commands
are not fulfilled
Check position of proximity sensor and readjust
Tab. 5 Fault clearance
9
Disposal
Dispose of the product and packaging at the end of its useful life through environ-
mentally friendly recycling in accordance with applicable regulations.
10
Technical data
Characteristic
Robot UR3/UR5/UR10: from software version Poly-
Scope CB 3.8.0
Robot software version
Robot UR3e/UR5e/UR10e/UR16e: from software ver-
sion PolyScope SW 5.0.0
Product weight (moving
mass)
[g]
Adaptive shape g proximity sensor (2x): 495
Tab. 6 Technical data, general