





























EVCO S.p.A.
EVDRIVE04 | User manual ver. 4.1 | Code 144EPDE114
page 60 of 78
8.2.2
Commands
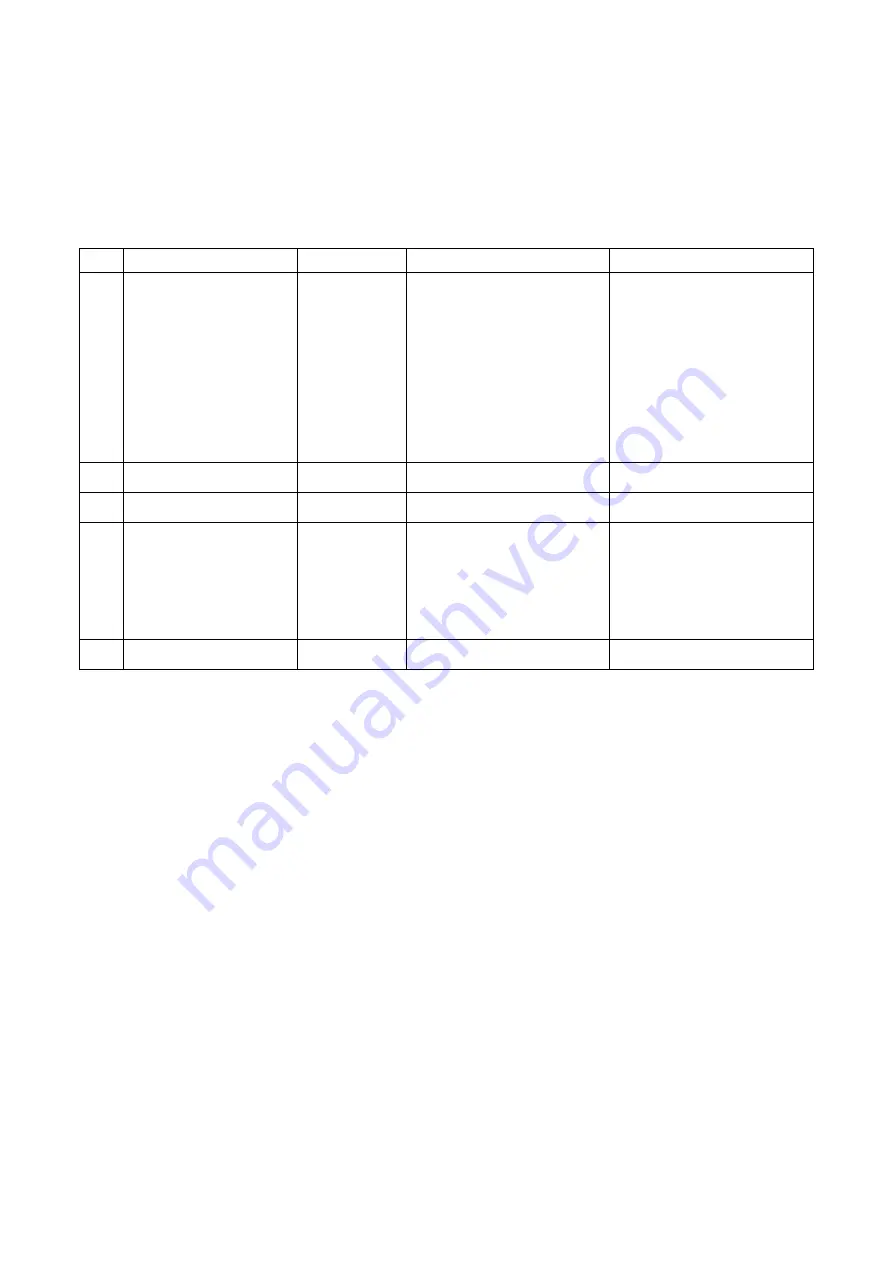
For the variables that need an immediate refresh, commands are implemented.
The CommandOut allows to write commands on the device. The device performs the new values as soon as possible.
The CommanIn allows to read variables from device. The device send a CommandIn every 5 seconds and on event
(see table).
Code UNIPRO/SoHVAC Name
Sent variables
Event
38
Send EVCM command
Controller to
EVDrive
bit 0:
Enable valve command
bit 1:
Resynchronization
request
bit 2:
Functioning mode
0 = algo
1 = manual
bit 3:
SH control parameters
selection
0 = set 1
1 = set2
bit 4-7: reserved
bit 8-15: bit 0-7 mask
39
Send EVCM Manual Pos
Controller to
EVDrive
Manual valve position set-point
40
Receive EVCM Current
Pos
EVDrive to
Controller
Current valve position %
Current position < 5%
41
Receive EVCM Status
EVDrive to
Controller
bit 0-7:
FSM status
bit 8:
Enable valve status
bit 9:
Resynchro request
status
bit 10:
Used SH control
parameters set
0 = set 1
1 = set2
Every change
42
Receive EVCM Status
EVDrive to
Controller
Alarm status
Every change
8.3
MODBUS serial communication
Serial communication via the RS-485 port may use the ModBus protocol. The accessible variables and parameters are
those shown in the tables in the section “Configuration”. These same tables also include ModBus addresses (base 1).
The same rules covered earlier for the communication alarm management also apply to the valve
Enable valve
command
(EnaV) (see “Communication error”).
The port configuration can be performed using dedicated configuration pages on EPJgraph or LCD display.
The default setting for ModBus communication via RS485 port is 9600 bps, even parity, 1 stop bit.







































































