





























Digitax ST User Guide
59
Issue: 5
6.2.5 Motor parameters
This parameter must be set correctly for the vector control algorithms to
operate correctly. When auto is selected the number of poles is set to 6.
The phase angle between the rotor flux in a servo motor and the
encoder position is required for the motor to operate correctly. If the
phase angle is known it can be set in this parameter by the user.
Alternatively the drive can automatically measure the phase angle by
performing a phasing test (see autotune in servo mode Pr
0.40
). When
the test is complete the new value is written to this parameter. The
encoder phase angle can be modified at any time and becomes effective
immediately. This parameter has a factory default value of 0.0, but is not
affected when defaults are loaded by the user.
Pr
0.45
is the motor thermal filter of the motor, and is used (along with
the motor rated current Pr
0.46
, and total motor current Pr
0.12
) in the
thermal model of the motor in applying thermal protection to the motor.
Setting this parameter to 0 disables the motor thermal protection.
Enter the name-plate value for the motor rated current.
This parameter is read only.
6.2.6 Status information
This parameter controls access via the drive keypad as follows:
The keypad can adjust this parameter even when user security is set.
The parameter displays the software version of the drive.
Each bit in this parameter has the following functions:
Stop on non-important trips
If bit 0 is set to zero then the drive simply trips when a non-important trip
occurs. Non-important trips are: th, ths, Old1, cL2, cL3, SCL. If bit 0 is
set to one the drive will stop before tripping when one of these trips is
initiated, except in Regen mode where the drive trips immediately.
Disable braking IGBT trips
For details of braking IGBT trip mode see Pr
10.31
.
Disable phase loss trip
The user can disable the phase loss trip in 200 V drives as these are
allowed to operate from a single phase supply. If bit 2 is set to zero the
phase loss trip is enabled. If bit 2 is set to one the phase loss trip is
disabled in 200 V drives only.
Disable braking resistor temperature monitoring failure detection
Digitax ST have an internal user install braking resistor with a thermistor
to detect overheating of the resistor. If the resistor is not installed the trip
can be disabled by setting Pr
10.37
(
0.51
) to 8. If the resistor is installed
then no trip is produced unless the thermistor fails. With the resistor
installed Pr
10.37
must be set to zero.
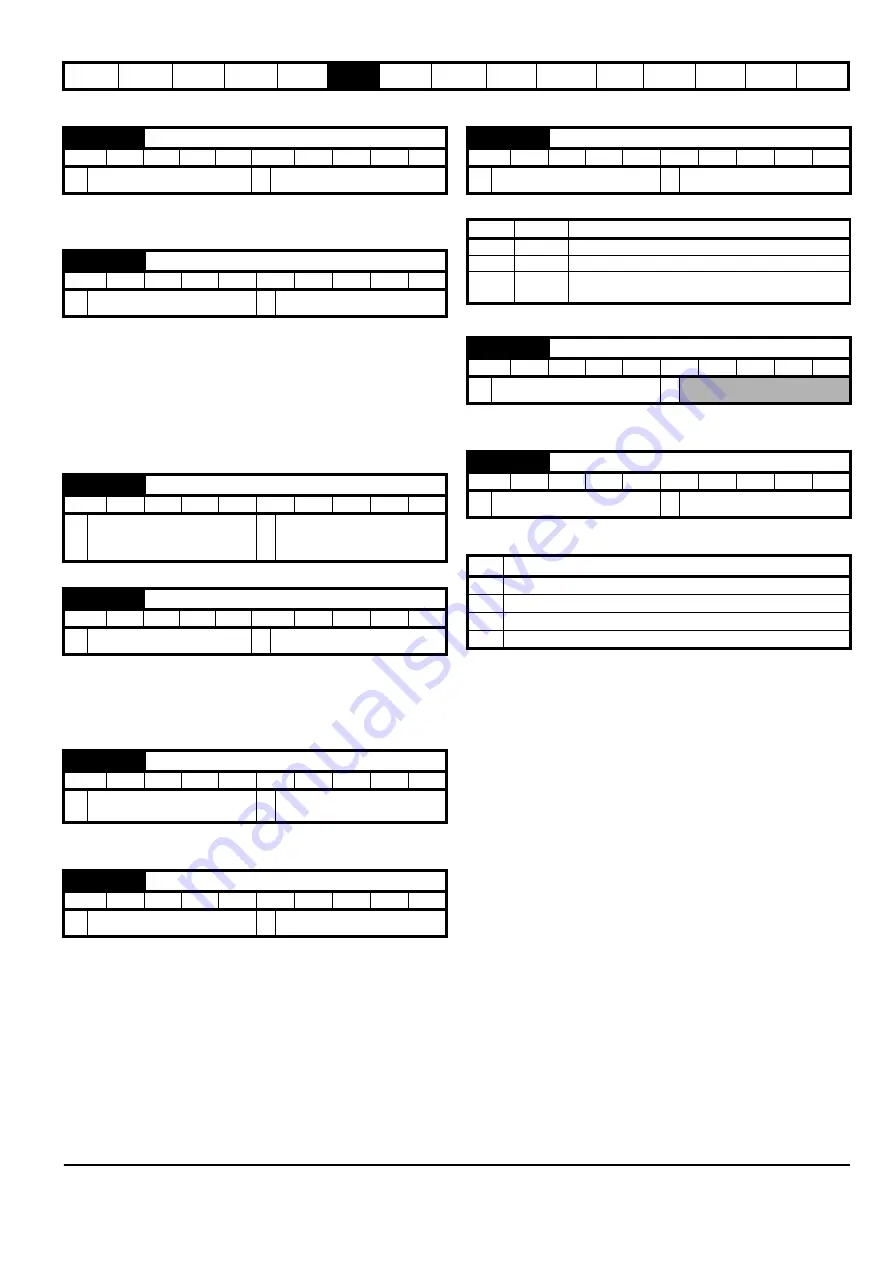
0.42 {5.11}
No. of motor poles
RW
Txt
US
Ú
0 to 60 (Auto to 120 Pole)
Ö
6 POLE (3)
0.43 {3.25}
Encoder phase angle
RW
Uni
US
Ú
0.0 to 359.9°
Ö
0.0
0.44 {5.09}
Motor rated voltage
RW
Uni
RA
US
Ú
0 to
AC_VOLTAGE_SET_MAX V
Ö
200 V drive: 230
400 V drive: EUR> 400
USA> 460
0.45 {4.15}
Motor thermal filter
RW
Uni
US
Ú
0 to 3000.0
Ö
20.0
0.46 {5.07}
Motor rated current
RW
Uni
RA
US
Ú
0 to
RATED_CURRENT_MAX A
Ö
Drive rated current [
11.32
]
0.48 {11.31}
User drive mode
RO
Txt
NC
PT
Ú
SErVO (3)
Ö
SErVO (3)
0.49 {11.44}
Security status
RW
Txt
PT
US
Ú
0 to 2
Ö
0
Value
String
Action
0
L1
Only menu 0 can be accessed
1
L2
All menus can be accessed
2
Loc
Lock user security when drive is reset.
(This parameter is set to L1 after reset.)
0.50 {11.29}
Software version number
RO
Uni
NC
PT
Ú
1.00 to 99.99
Ö
0.51 {10.37}
Action on trip detection
RW
Uni
US
Ú
0 to 15
Ö
0
Bit
Function
0
Stop on non-important trips
1
Disable braking IGBT trips
2
Disable phase loss trip
3
Disable braking resistor temperature monitoring failure detection
Содержание Digitax ST
Страница 1: ...User Guide AC variable speed drive for servo motors Part Number 0475 0001 05 Issue 5 ...
Страница 209: ......
Страница 210: ...0475 0001 05 ...







































































