
























200
Digitax ST User Guide
Issue: 5
14.5 Network configuration objects
14.5.1 EtherCAT interface network loss trip
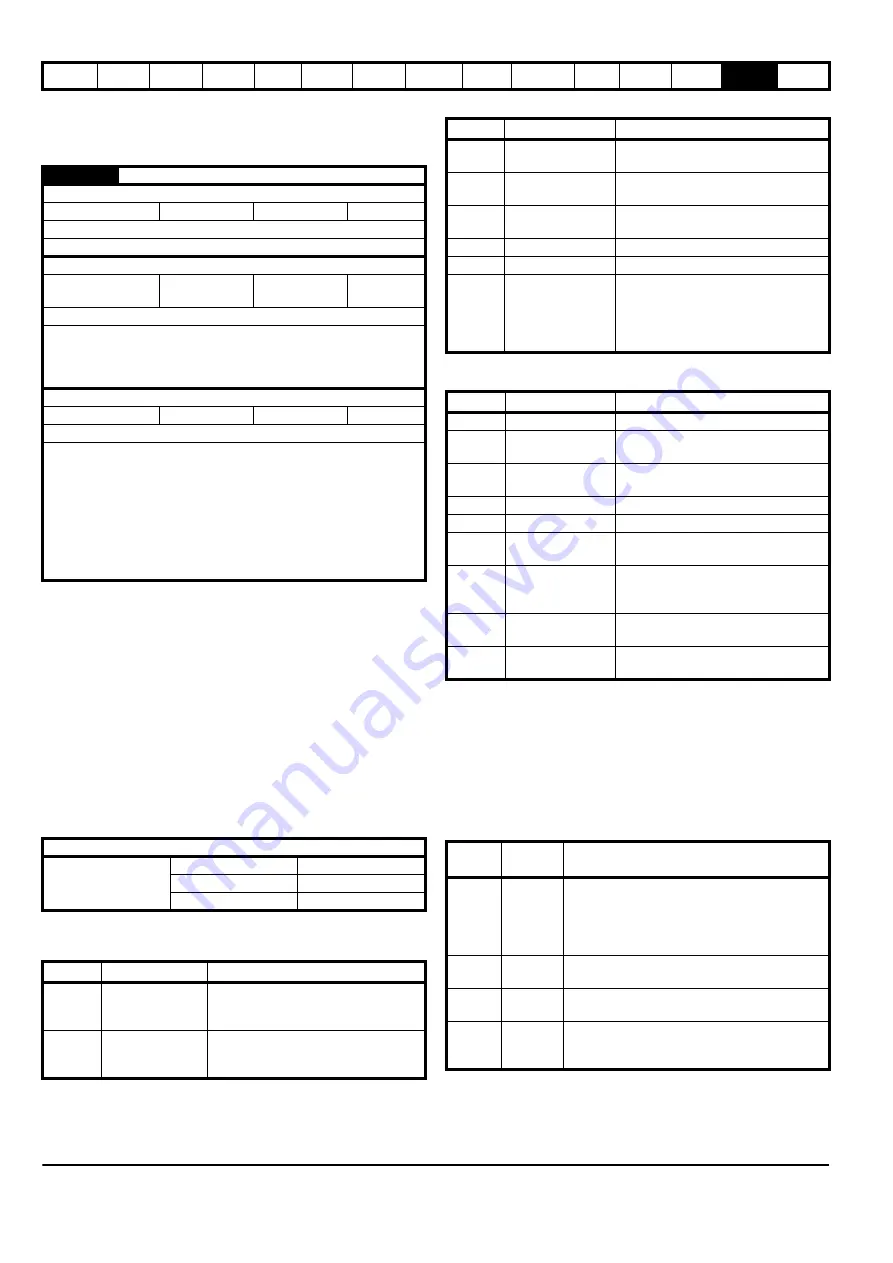
Table 14-10 Network loss behavior object
The EtherCAT interface resets an internal timer when a valid message is
received from the EtherCAT network. The network loss trip is triggered
when no new messages are received before the timer times out. The
EtherCAT interface will trip the drive and the
EtherCAT interface error code parameter (Pr
17.50
) will show 120.
After power-up or reset the network loss trip is not armed until one of the
following events occur:
•
SYNC message is received
•
RxPDO is received
Once the trip has been armed, a minimum of one of the above
messages must be received or transmitted in each time period set in
sub-index 2 of the Network loss behavior object (0x2813).
14.6 Diagnostic parameters
Table 14-11 EtherCAT interface operating status
14.6.1 Running states
Table 14-12 Diagnostic information - running states
Table 14-13 Diagnostic information - application
Table 14-14 Diagnostic information - bootloader
14.7 Drive trip display codes
If the EtherCAT interface detects an error during operation, it will force a
trip on the drive. However, the trip code displayed on the drive will only
indicate which slot initiated the trip. The exact reason for the trip will be
indicated in the EtherCAT interface error code parameter, Pr
17.50
.
Table 14-15 shows the possible trip codes that will be displayed on the
drive when a problem is detected with EtherCAT interface or when
EtherCAT interface initiates a trip.
Table 14-15 Drive trip display codes
0x2813
Network loss behavior
Sub-index 0:
Access: RO
Range: N/A
Size: 1 byte
Unit: N/A
Default: 2
Description: The number of sub-indices in this object.
Sub-index 1: Maximum time interval
Access: RW
Range: 0 to
65535
Size: 2 bytes
Unit: ms
Default:
0 (by default the network loss behavior is disabled).
Description:
The maximum time, in ms, allowed between accesses to
PDOs (read or write). If no PDO access occurs for this
period, the option will start network loss handling. If a
value of zero is set, no network loss handling will occur.
Sub-index 2: Trip type
Access: RW
Range: 0 to 2
Size: 1 byte
Unit: N/A
Default: 0
Description:
Network loss trip type. If this value is set to 0, a network
loss trip will never occur; however, a network loss will still
be handled by stopping the drive and indicating a
warning as previously described. If this value is set to 1,
the network loss trip will occur only after the motor has
been stopped according to the Fault reaction option
code. If the value is set to 2, the network loss trip will
occur immediately on network loss (this implies that the
motor will coast).
EtherCAT interface operating status
Pr
17.06
Default
N/A
Range
-9999 to 9999
Access
RO
Pr
17.06
Meaning
Description
0
Link established
A link has been established but no
frames are being transmitted or
received.
>0
Handled
messages per
second
The number of cyclic PDO messages
that the active EtherCAT is handling per
second.
Pr
17.06
Meaning
Description
-99
Application started
The main application has been
launched.
-70
Initializing file
system
The file system is initializing.
-50
Initializing
databases
The databases are initializing.
-30
Initializing fieldbus The fieldbus is initializing.
-25
Starting fieldbus
The fieldbus is starting.
-1
Initialization
complete
The EtherCAT interface has initialized
correctly but no network
communication is taking place. i.e. no
EtherCAT frames have been
transmitted or received.
Pr
17.06
Meaning
Description
-199
Boot loader start
The bootloader is starting up.
-180
Initializing memory
The memory manager is being
initialized.
-150
Initializing file
system
The file system handler is being
initialized.
-149
Format file system The file system is being formatted.
-148
Verify file system
The file system is being verified.
-130
Check boot mode
The required boot mode is being
checked.
-110
Loading application
The requested application image is
being copied from the file system to
memory.
-101
Launching
application
The application is being launched.
-100
Default mode
The bootloader has finished but no
application was launched.
Trip
Code
Fault
Description
SL3.HF/ Hardware
fault
The drive has detected that the EtherCAT
interface
is present, but is unable to
communicate with it. If this occurs, please
contact your supplier or local Emerson Industrial
Automation Centre.
SL3.Er/
Error
Error trip generated by EtherCAT interface
SL3.nF/ Not
installed
This trip will occur if the EtherCAT interface has
been removed from the drive.
SL3.dF/
Different
module
installed
The slot configuration parameters stored in the
drive are not valid EtherCAT interface
configuration parameters.
Содержание Digitax ST
Страница 1: ...User Guide AC variable speed drive for servo motors Part Number 0475 0001 05 Issue 5 ...
Страница 209: ......
Страница 210: ...0475 0001 05 ...





















































