
























48
Parameter setting
Actuator KNX S1R-BA4-UP 24 V
• Version: 27.05.2020 • Technical changes and errors excepted.
6.2.3. Connection option for zero position sensors
See also section
Movement Range Limit
in chapter
examples and the communication object numbers refer to the mutual master-slave
coupling of drives at the output channel A and channel B.
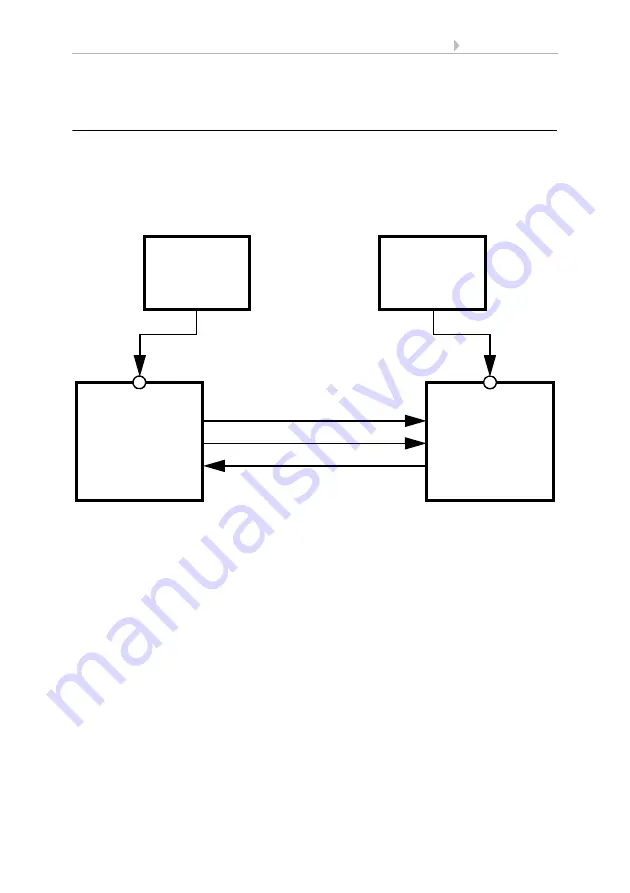
Actuator A is Master, zero position sensor at input 1 of the actuator,
Actuator B is Slave, zero position sensor at input 1 of the actuator:
IN 1
IN 1
zero position
zero position
Master
Drive 1
at channel A
Slave
Drive 2
at channel B
Master command
Master zero position status
Slave zero position status
173
172
176
175
174
177
of drive 1
of drive 2
sensor
sensor







































































