





























Repeat the test with different damping values according to the following guideline:
Try using the largest damping factor value, which knocks out the resonance. Do not
try using damping factors that are too small (0.07 is considered small) because too
low a damping factor introduces more phase delay, and is less robust to resonant
frequency variations
1
.
Continue the PI manual tuning process for designing KI and KP as described in the
previous section.
3.3 Advanced Manual Tuning
For this procedure, we will use the tuning from low-pass filter (section
3.2.1). Going
slow with the parameters we set will cause instability due to lack of information.
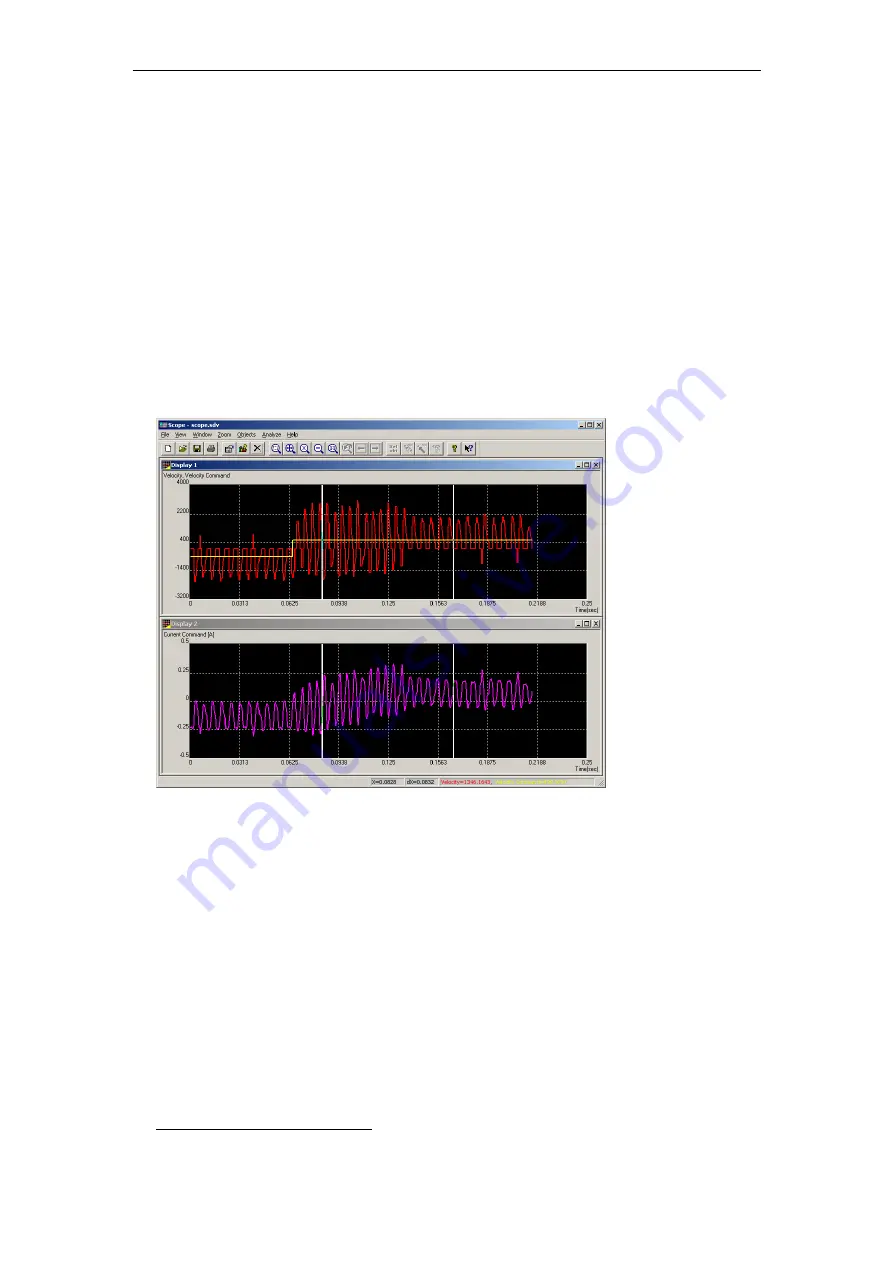
A step response of 500 cnt/sec with the same parameters will look like this:
1
The resonant frequency may change due to load or posture changes.
20
Elmo
HARmonica Tuning Guide
HARTG0903
Содержание HARmonica
Страница 1: ...Elmo HARmonica Hands on Tuning Guide September 2003...
Страница 4: ......
Страница 9: ...5...
Страница 10: ...6 Elmo HARmonica Tuning Guide HARTG0903...
Страница 11: ...7...
Страница 12: ...8 Elmo HARmonica Tuning Guide HARTG0903...
Страница 32: ...28 Elmo HARmonica Tuning Guide HARTG0903...
Страница 38: ...1000 cnt sec 7 5 RPM 500 cnt sec 3 75 RPM 34 Elmo HARmonica Tuning Guide HARTG0903...







































































