










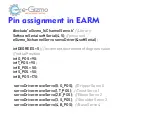




E-ARM modified calibration
BASE
HOME = 170
GRIPPER
HOLD = 10, OPEN = 140*
TWIST
RIGHT= 160 ,HOME= 90 ,LEFT= 0
SHOULDER
UP = 160 ,HOME=50, DOWN=0
ELBOW
RETRACT =20,HOME= 50, EXTEND =160
* Do this at your own risk!!
You may use the Serial Monitor first to see the degree values,
Before setting it up. Do it for each servo until you find the correct degrees.
Содержание THE BEAST
Страница 4: ...GizduinoPlus GizduinoPlus ATmega644P ATmega644P MAJOR PARTS...
Страница 6: ...Mobot Shield Mobot Shield MAJOR PARTS...
Страница 7: ...Mobot Shield Mobot Shield MAJOR PARTS 29 30 31 8 9 10 11 Jumper pad Jumper pad...
Страница 15: ...Mobot Shield Mobot Shield Wiring Distance Sensors...
Страница 17: ...Mobot Shield Mobot Shield Wiring Compact Proximity Sensors...
Страница 20: ...Mobot Shield Mobot Shield LED Indicators Buttons Buzzer Relays...
Страница 23: ...The Arduino IDE...
Страница 24: ...Connect the BEAST to PC USB Connector USB Cable Open Arduino IDE...
Страница 45: ...EARM major parts GRIPPER ELBOW SHOULDER BASE TWIST...