












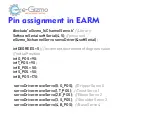




Pin assignment in EARM
#include”eGizmo_16ChannelServo.h”
//Library
SoftwareSerial softSerial(4, 5);
//pins used
eGizmo_16channelServo servoDriver(&softSerial);
int DEGREES = 5;
// increment,decrement of degrees value
// Initial Position
int G_POS = 90;
int T_POS = 90;
int E_POS = 50;
int S_POS = 50;
int B_POS = 170;
servoDriver.moveServo(0, G_POS);
//Gripper Servo 0
servoDriver.moveServo(1, T_POS);
//Twist Servo 1
servoDriver.moveServo(2, E_POS);
//Elbow Servo 2
servoDriver.moveServo(3, S_POS);
//Shoulder Servo 3
servoDriver.moveServo(4, B_POS);
//Base Servo 4
Содержание THE BEAST
Страница 4: ...GizduinoPlus GizduinoPlus ATmega644P ATmega644P MAJOR PARTS...
Страница 6: ...Mobot Shield Mobot Shield MAJOR PARTS...
Страница 7: ...Mobot Shield Mobot Shield MAJOR PARTS 29 30 31 8 9 10 11 Jumper pad Jumper pad...
Страница 15: ...Mobot Shield Mobot Shield Wiring Distance Sensors...
Страница 17: ...Mobot Shield Mobot Shield Wiring Compact Proximity Sensors...
Страница 20: ...Mobot Shield Mobot Shield LED Indicators Buttons Buzzer Relays...
Страница 23: ...The Arduino IDE...
Страница 24: ...Connect the BEAST to PC USB Connector USB Cable Open Arduino IDE...
Страница 45: ...EARM major parts GRIPPER ELBOW SHOULDER BASE TWIST...