





















Understanding the code (cont.)
This robot uses some timers in the code to control certain functions. This is done using the millis() function which
counts the number of milliseconds since the robot was turned on. We will briefly look at how the unsigned long
variable
sit
is used to measure boredom in the robot.
In the [
Play
] tab,
sit
is set to equal the value reported by the
millis()
function whenever the robot takes a step. This
resets the boredom timer because the difference between
millis()
and
sit
is reset to 0.
In the
loop()
section of the code, the difference between
millis()
and
sit
are compared to the constant
Boredom
.
The result is that if the robot does not take a step for
Boredom
milliseconds then the robot will become bored and sit
down. Once this happens, the timer cannot be reset unless you make the robot look up at which point the variable
sit
is set to equal the new value of
millis()
in the [
SitShakeLiedown
] part of the code and the difference is now 0 again.
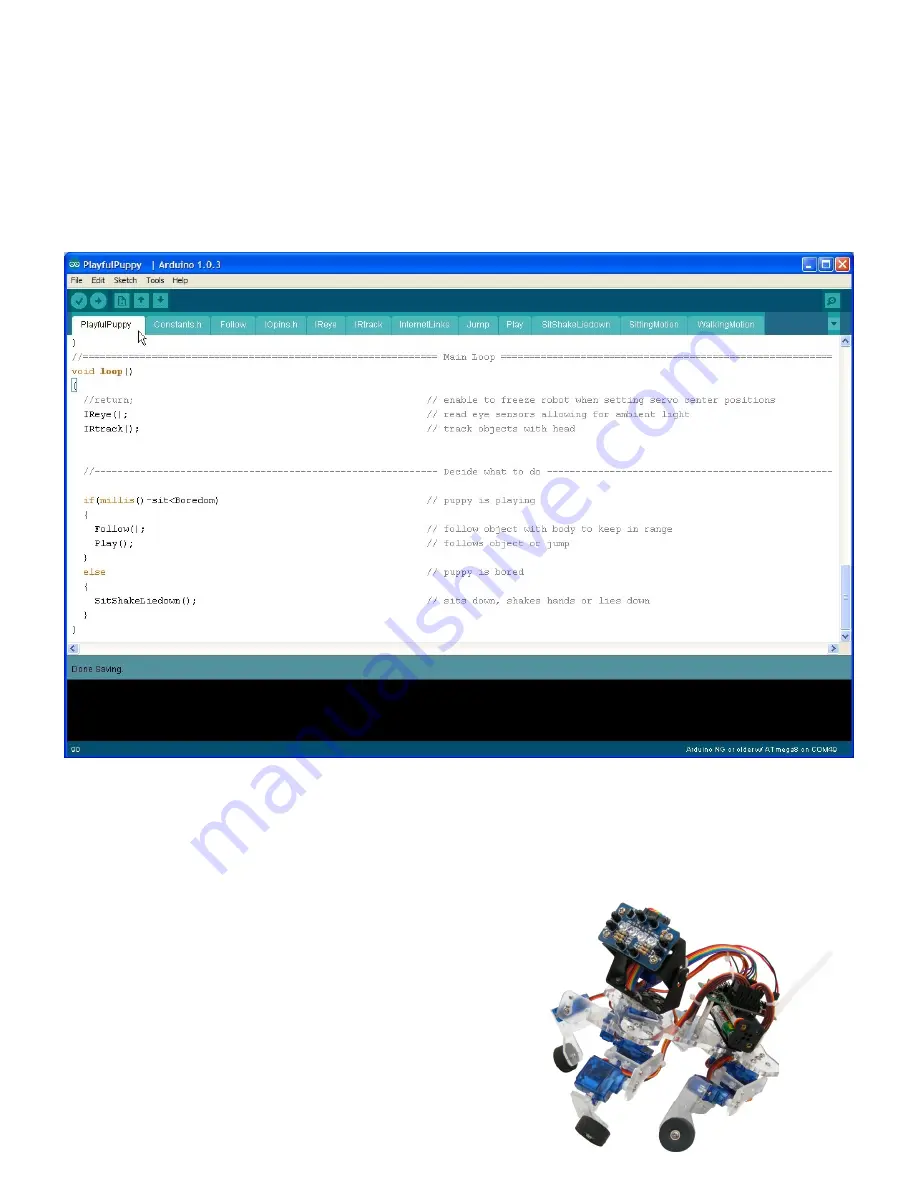
In the loop() function, the program constantly reads the sensors in the eye, tracks movement with the head. If the
puppy is not bored then it will follow your hand and walk / jump in play mode. If the puppy becomes bored then it will
sit down. In this mode it will shake hands or lie down.
19







































































