


















12
synchronism if operating above its Start/Stop torque capability.
z
The inputs are optically isolated and may be driven by providing a negative signal with respect to
the + input. The output driver of controller must be capable of providing a minimum sink current of
10mA to ensure proper operation.
z
When the output pulse type of controller is Line Driver, connect +/- signal directly to the +/-
connectors of drive.
z
Use the twisted pair cable for pulse inputs of drive. If you don’ t have twisted pair cable, twist the
+/- pulse input lines
z
The line for pulses should be made as short as possible for electric noise immunity.
z
For proper operation, when the input photo-diode is on, drive pulse input current should be 10mA
– 25 mA. Check the current as follows:
(For example) the power supply voltage for pulse input is 5V, the voltage of - connector is measured
as 1 Volt, then the diode current is calculated as
{5 volt – 1 volt – 1.2 volt (photocoupler diode on voltage)} / 330 ohm
≅
8.5 mA
This may cause the malfunction of drive. Make the voltage of – connector be zero.
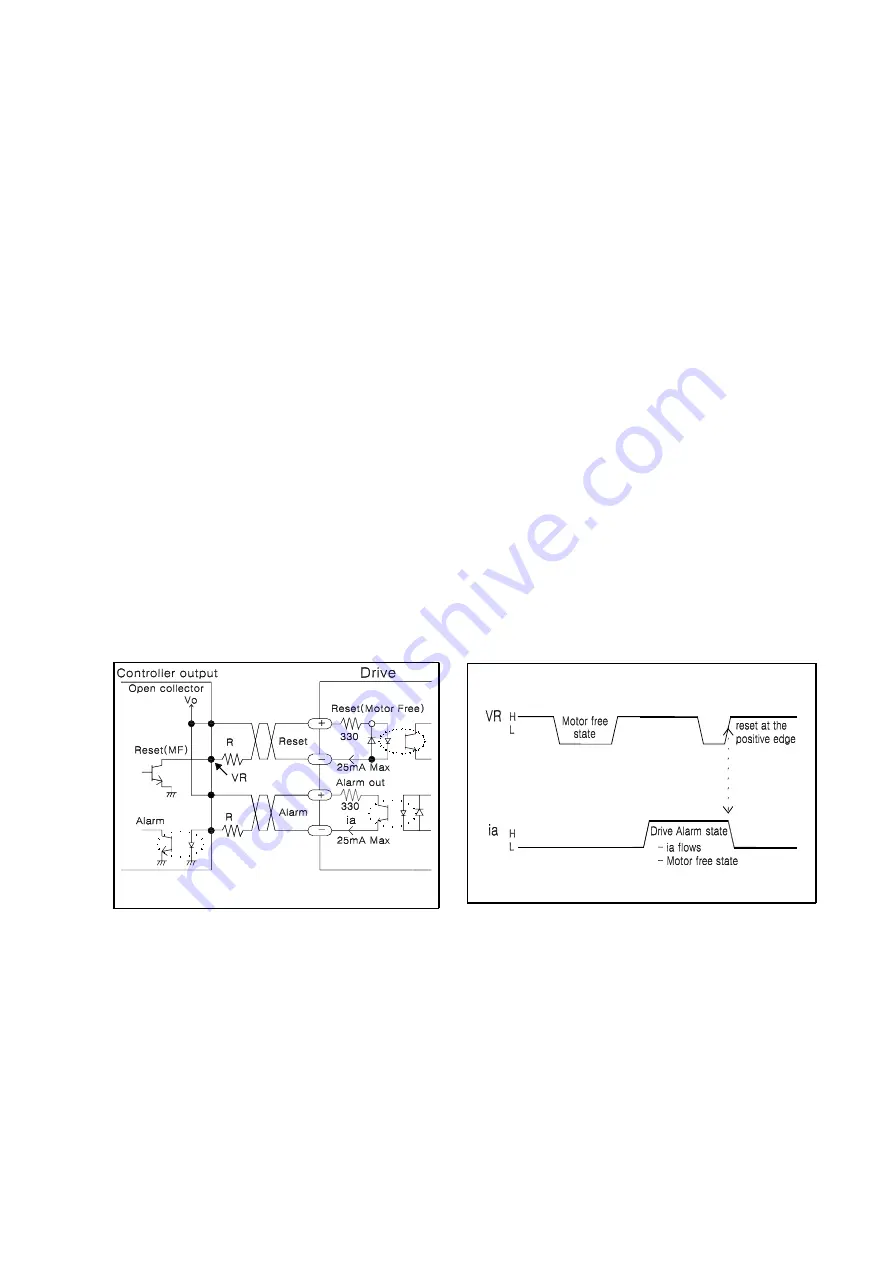
6.2 drive control signal: FAULT out, RESET(MF) in
Fig.8 Drive in/out signal for control
z
The drive has one dedicated hardware fault output. The output is an optically isolated open
collector transistor. The Fig.8 is a schematic showing the optically isolated fault output. Refer to Fig.8,
the alarm output transistor is normally cut-off state. The transistor turns on when alarm occurs. The
following conditions will cause alarm output to turn on:
G
over current (Current limit is 8A for 4A drive)
G
overheat ( heat limit is 70°c
at the case)
G
arm short ( short between power and motor connectors, between motor connectors)







































































