





























26
Shenyang Bluelight Automatic Technology Co., Ltd.
BL6-DU20PX series Integrated Door Motor Controller User Manual
performances may go down.
3. For asynchronous motor, the integrated controller does not require further tune, but set the
basic parameters. Trial run is ready.
6.3
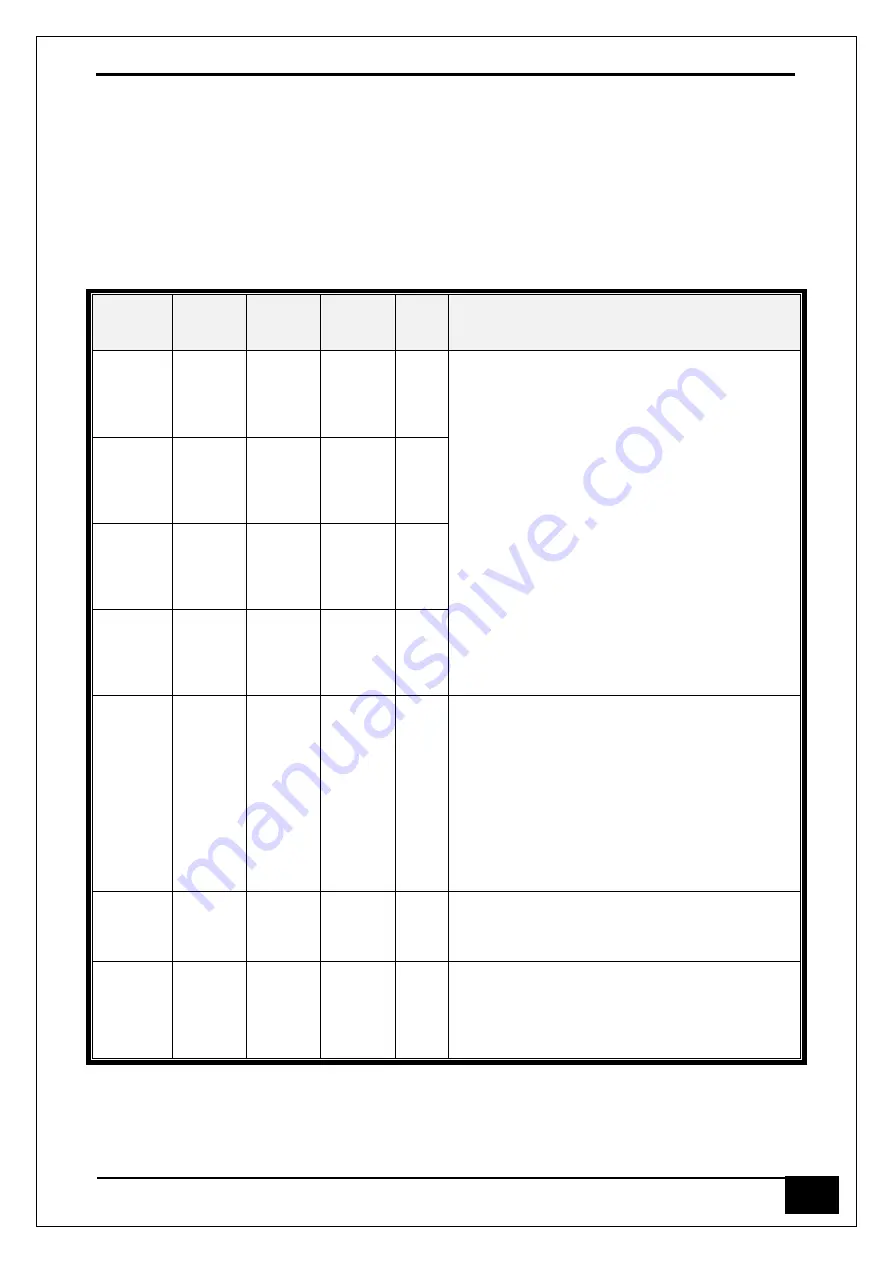
F2 Performances Parameter
Chart 6.3 F2 Performances Parameter
Function
Code
Name
Setting
Range
Factory
Default
Setting
Min
Unit
Description
F200
Speed
Loop K
P
0~9999
1000
1
The speed dynamic response performance with
vector control can be regulated by setting the K
P
and K
I
of the Speed Regulator. Larger K
P
or smaller
K
I
make a faster speed loop dynamic response.
Too large K
P
or too small K
I
may produce a system
oscillation.
Usually,
the
default
factory
parameters can make good performance. If not,
tune the factory value slightly, enlarge the K
P
and
keeping the system out of oscillation, and then
decrease the K
I
to get a faster response and a
smaller overshoot. The current loop parameters
generally do not need to be adjusted. But if it's
needed, please tune as the speed loop
parameters.
Note: Improper PI parameters may produce a too big
overshoot and even produce an over-voltage fault as
the overshoot goes down.
F201
Speed
Loop K
I
0~9999
600
1
F202
Current
Loop K
P
0~9999
6000
1
F203
Current
Loop K
I
0~9999
3000
1
F204
Speed
Filter
Grade
0~9999
10
1
This parameter is for the filtering level of encoder
feedback speed. No need to adjust normally. In
the case of severe interference or very few
encoder lines, the closed loop vector control
mode should be used. The filtering level of the
feedback speed can be increased appropriately so
that the motor can run more smoothly.
Note: In the situation of small inertia of the motor and
load, too large parameter may produce badly motor
overshoot or motor oscillation.
F205
Encoder
Pulses
0~9999
600
1
The pulse encoder parameters should be set
appropriately for door motor controller closed-loop
vector running.
F206
Door-
open
Torque
Promoti
on
0~30%
(Motor
Rated
Torque)
5.0%
0.1%
If the load of door motor controller is too heavy, and
the door cannot open, increases this parameter to
raise the torque output as the motor opening the door.
Over-raised torque may cause the motor too hot, and
the controller over-current.






































































