





























RoboClaw Series
Brushed DC Motor Controllers
RoboClaw Series User Manual
51
BASICMICRO
RC Control
RC Mode
RC mode is typically used when controlling RoboClaw from a hobby RC radio. This mode can also
be used to simplify driving RoboClaw from a microcontroller using servo pulses. In this mode S1
controls the direction and speed of motor 1 and S2 controls the direction and speed of motor 2.
RC Mode With Mixing
This mode is the same as RC mode with the exception of how S1 and S2 controls the attached
motors. When used with a differentially steered robot, mixing mode allows S1 to control the
speed forward and backward and S2 to control steering left and right.
RC Mode with feedback for velocity or position control
RC Mode can be used with encoders. Velocity and/or Position PID constants must be calibrated
for proper operation first. Once calibrated values have been set and saved into Roboclaws
eeprom memory, encoder support using velocity or position PID control can be enabled. Use
Motion Studio control software or Packet Serial commands, enable encoders for RC/Analog
modes (See Configuration Using Ion Studio).
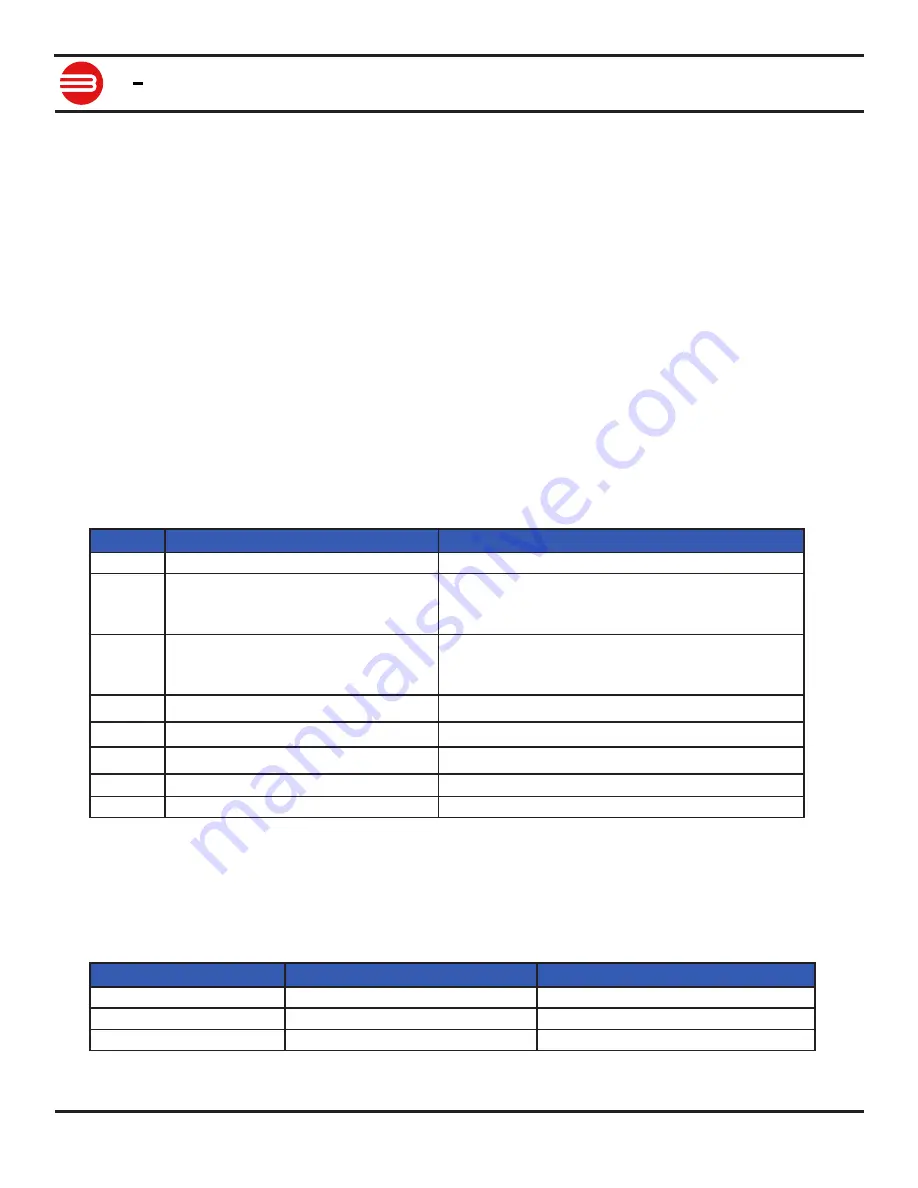
RC Mode Options
Option
Function
Description
1
TTL Flip Switch
Flip switch triggered by low signal.
2
TTL Flip and Exponential Enabled
Softens the center control position. This mode is ideal
with tank style robots. Making it easier to control from an
RC radio. Flip switch triggered by low signal.
3
TTL Flip and MCU Enabled
Continues to execute last pulse received until new
pulse received. Disables Signal loss fail safe and auto
calibration. Flip switch triggered by low signal.
4
TTL Flip and Exponential and MCU Enabled
Enables both options. Flip switch triggered by low signal.
5
RC Flip Switch Enabled
Same as mode 1 with flip switch triggered by RC signal.
6
RC Flip and Exponential Enabled
Same as mode 2 with flip switch triggered by RC signal.
7
RC Flip and MCU Enabled
Same as mode 3 with flip switch triggered by RC signal.
8
RC Flip and Exponential and MCU Enabled
Same as mode 4 with flip switch triggered by RC signal.
Pulse Ranges
The RoboClaw expects RC pulses on S1 and S2 to drive the motors when the mode is set to RC
mode. The center points are calibrated at start up(unless disabled by enabling MCU mode). The
RoboClaw will auto calibrate these ranges on the fly unless auto-calibration is disabled. If pulses
below the minumum or over the maximum are received the range will be re-calibrated.
Pulse
MCU Mode Enabled
MCU Mode Diabled
Stopped
1520μs
Start Up Auto Calibration
Full Reverse
1120μs
+400μs
Full Forward
1920μs
-400μs







































































