





























Autopilot Installation Manual
4.2
Autopilot Settings
4.2.4
Controller Parameters
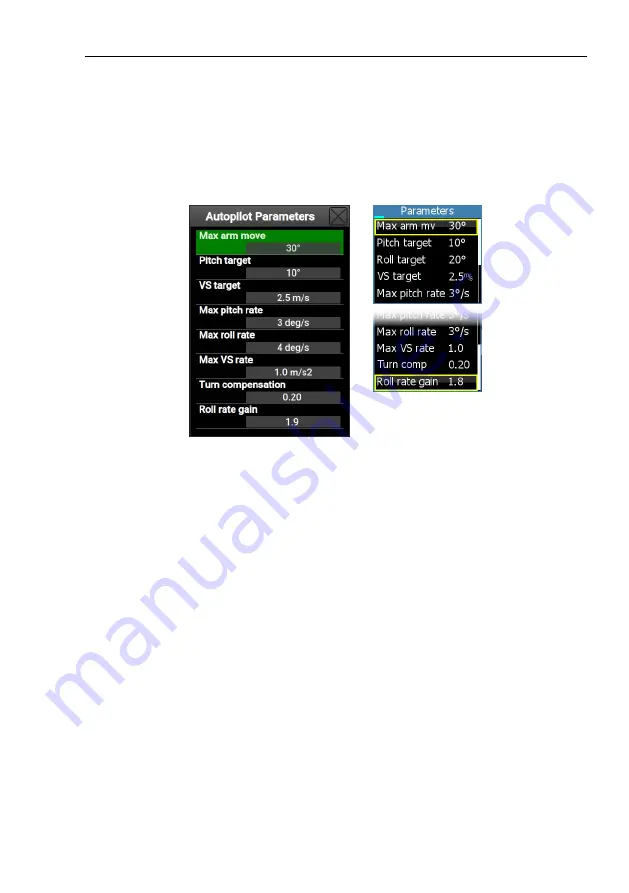
This window defines various parameters that are required for optimal opera-
tion. Some of these values can be only determined during flight test. Figure
10 illustrates an example.
Figure 10:
An example of autopilot parameters.
Max arm mv
defines maximal servo arm movement and is used to detect servo
slip condition. When autopilot is engaged, servo remembers its arm po-
sition and treats this as a zero angle. During operation servo monitors
virtual relative angle regarding the zero angle. If this virtual relative
angle exceeds the
Max arm mv
value, the system reports a
Motor slip
error
. Namely, servo does not measure angle directly, but it is counting
steps from
zero
position. If motor is slipping (servo torque is too small)
these counts will accumulate to a number (virtual angle) large enough
to trigger the error. Due to slips, the arm did not move that much in
reality.
Pitch target
this is the maximal pitch angle that controller will require for
a climb or a descent. This angle shall be smaller than max pitch from
the limits, section 4.2.3.
Roll target
is the maximal roll that can autopilot require in order to change
direction. This angle shall be smaller than max roll from the limits,
section 4.2.3.
23
©
Kanardia
2016-2020
Содержание Kanardia
Страница 1: ...Autopilot Installation Manual Kanardia d o o November 2020 Revision 2 1 ...
Страница 2: ......





















































