



























Astraada DRV-22 inverters Communication protocol
69
Function
instruction
Address
definition
Data meaning instruction
R/W
characteristics
Output torque
3007H
R
PID setting
3008H
R
PID feedback
3009H
R
Input IO state
300AH
R
Output IO state
300BH
R
AI 1
300CH
R
AI 2
300DH
Reserved
300EH
Reserved
300FH
Reserved
3010H
Reserved
3011H
Reserved
3012H
Reserved
3013H
External counting
value
3014H
Torque setting
3015H
Inverter code
3016H
Fault code
5000H
Setting frequency
3001H
R
Bus voltage
3002H
R
R/W characteristics means the function is with read and write characteristics. For example, “communication control command” is writing chrematistics and control
the inverter with writing command (06H). R characteristic can only read other than write and W characteristic can only write other than read.
Note: when operating on the inverter with the table above, it is necessary to enable some parameters. For example, the operation of running and stopping, it is
necessary to set P00.01 to communication running command channel and set P00.02 to MODBUS communication channel. And when operate on “PID given”, it
is necessary to set P09.00 to “MODBUS communication setting”.
The encoding rules for device codes (corresponds to identifying code 2103H of the inverter)
Code high
8bit
Meaning
Code low 8
position
Meaning
01
06
Astraada DRV-22 Vector Inverter
Note: the code is consisted of 16 bit which is high 8 bits and low 8 bits. High 8 bits mean the motor type series and low 8 bits mean the derived motor types of the
series. For example, 0110H means Astraada DRV-22 vector inverters.
7.3.6 Fieldbus ratio values
The communication data is expressed by hex in actual application and there is no radix point in hex. For example, 50.12Hz can not be expressed by hex so 50.12
can be magnified by 100 times into 5012, so hex 1394H can be used to express 50.12.
A non-integer can be timed by a multiple to get an integer and the integer can be called fieldbus ratio values.
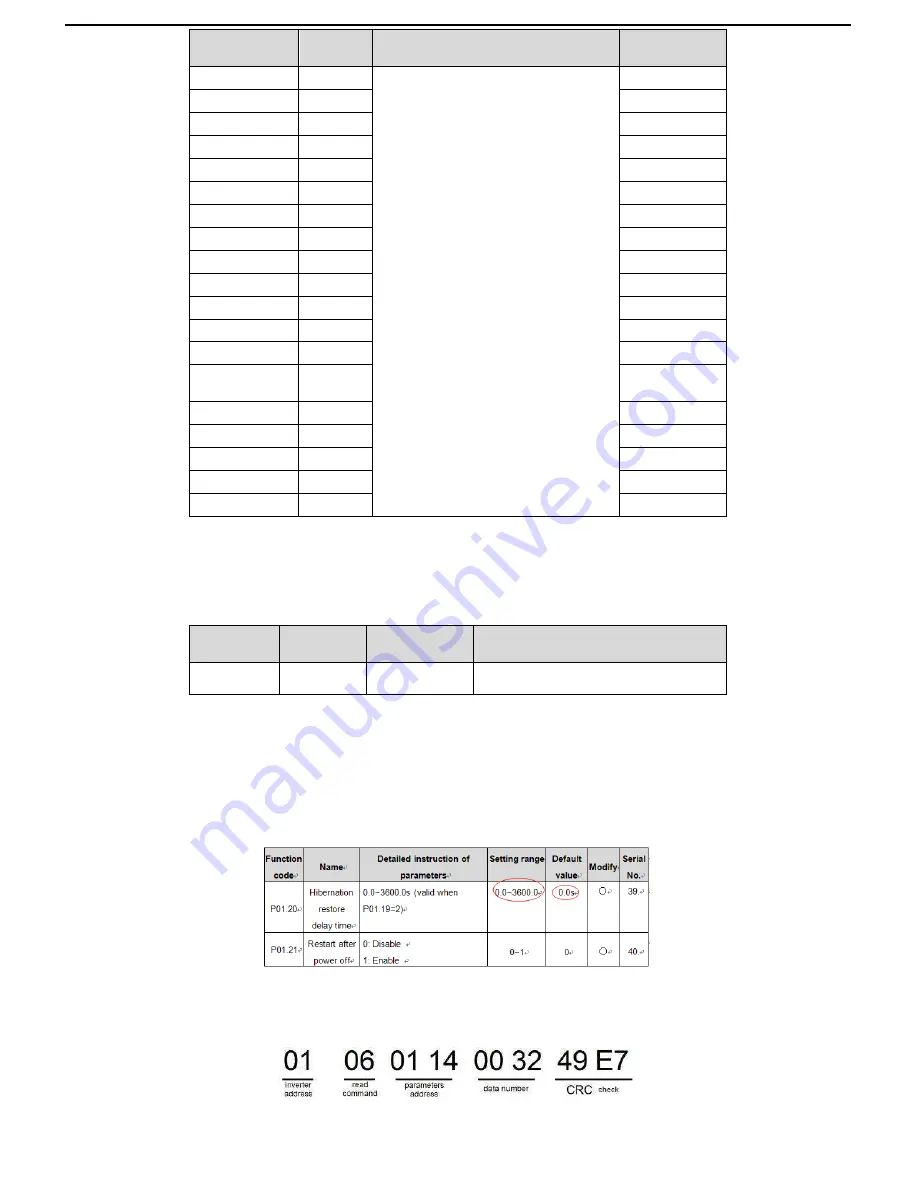
The fieldbus ratio values are referred to the radix point of the setting range or default value in the function parameter list. If there are figures behind the radix point
(n=1), then the fieldbus ratio value m is 10
n
. Take the table as the example:
If there is one figure behind the radix point in the setting range or the default value, then the fieldbus ratio value is 10. if the data received by the upper monitor is
50, then the “hibernation restore delay time” is 5.0 (5.0=50÷10).
If Modbus communication is used to control the hibernation restore delay time as 5.0s. Firstly, 5.0 can be magnified by 10 times to integer 50 (32H) and then this
data can be sent.
After the inverter receives the command, it will change 50 into 5 according to the fieldbus ratio value and then set the hibernation restore delay time as 5s.
Another example, after the upper monitor sends the command of reading the parameter of hibernation restore delay time ,if the response message of the inverter







































































