
























2 Manual
2.1 Marvin robot hardware
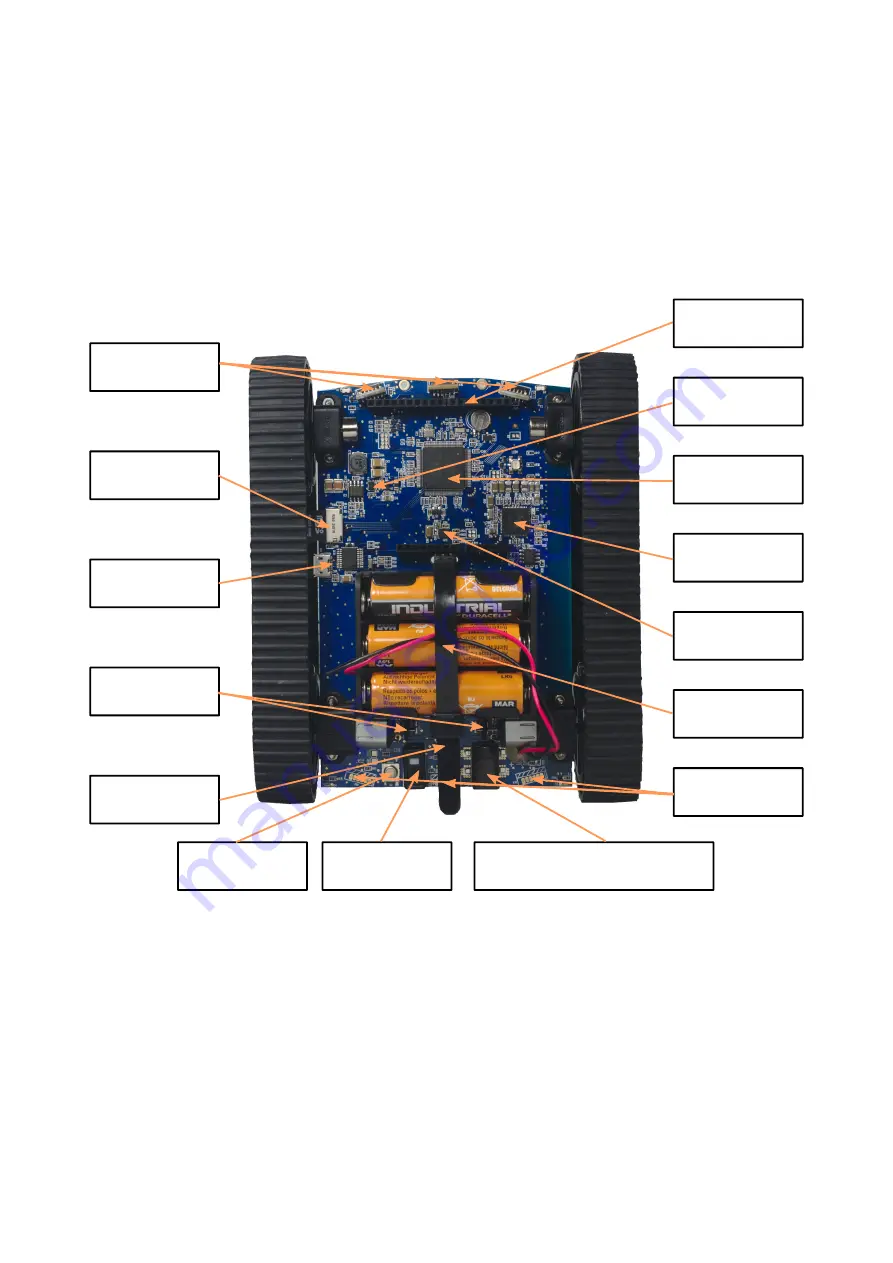
Proxi-Sensors
Micro-SD Card
USB Interface
Motor-Driver
Odometer
Arduino Ext.
Shield header
Power Supply
5.0 V und 3.3 V
TivaC 1294
WiFi Subsystem
9D Sensor
Battery-Holder
6 x AA
Proxi-Sensors
(optional)
Button
Main-Switch
Charge-Plug
(for rechargeable batteries)
Figure 2.1
Marvin robot hardware
Hint:
The best thing to handle the Marvin robot is to grab it on the battery compartment
or on the chains. In addition, it should be avoided to touch directly to the electronics
(microcontrollers, etc.) as precaution agaist electrostatic discharge (ESD!).
AREXX Engineering & JM³ Engineering
Version: 1.3.1
October 27, 2017
Page: 4



































































