





























8 Operating Payload
8.1 Standard Data Capture Workflow
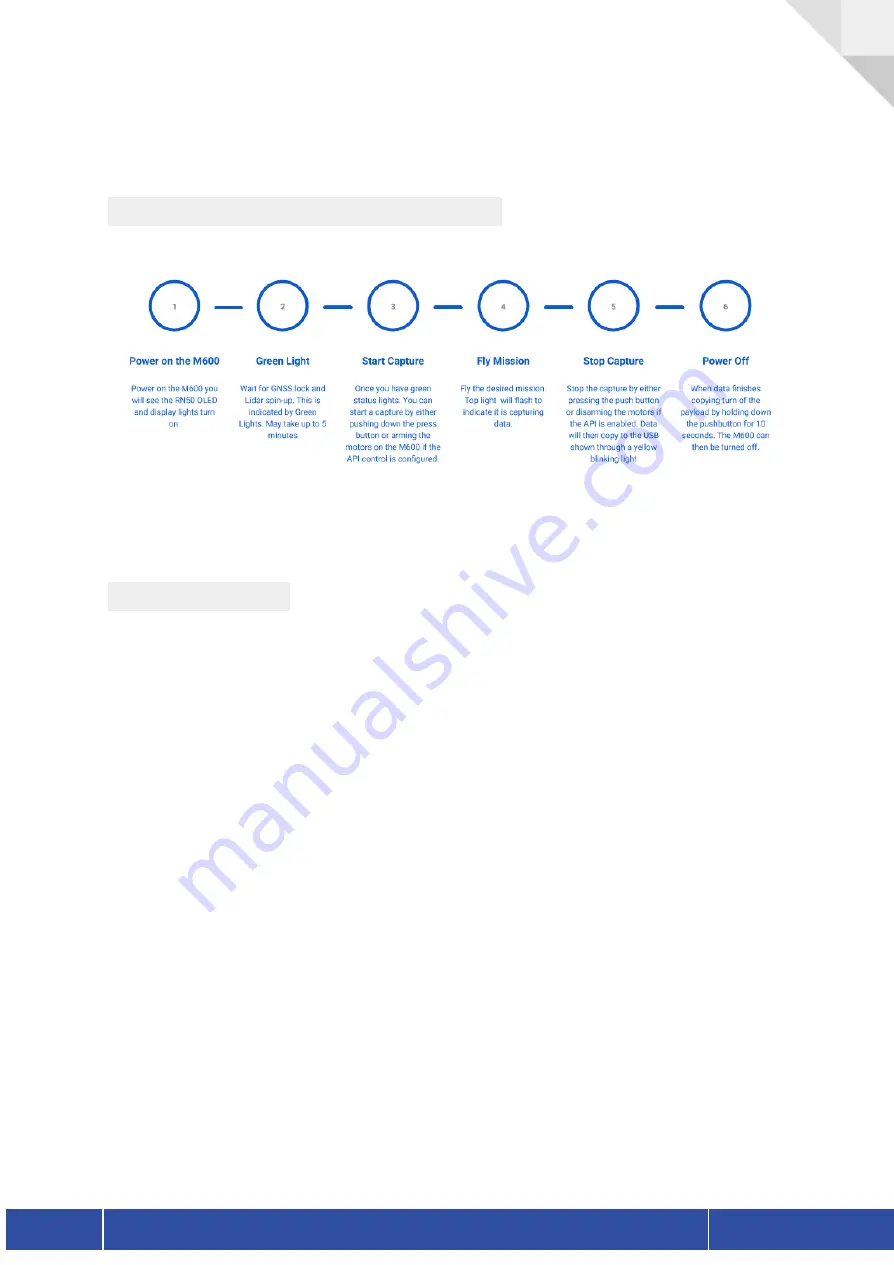
This section outlines the operation of the payload when attached to the scanning mount.
8.2 Data Capture
The RN50 has two different types of data capture initiation. This includes a manual start/stop
capture and a flight controller enabled auto capture. A user can always initiate a manual
capture even when the auto capture is enabled and plugged in. To enable auto capture please
refer to the API configuration section within this user guide.
8.2.1 Manual Capture
To start manually capturing data the system first needs to be in a state where it is ready to
capture. This occurs when there are no internal errors within the system.
When the two status leds on the display panel are green the system is ready to capture.
If for some reason the lights are presenting either as a constant red or yellow please refer to
the Status Description section below for more details.
Once these lights are green the system is ready to capture. To initiate a capture the user needs
to press the push button for half a second. This will start a capture, indicated by a blinking
green light on the display panel as well as the side led strips going green. If for any reason the
side led lights go red this indicates that there is an error with the data capture process. After
the mission has been flown the capture will need to be manually stopped. This is done by
pressing the button for half a second.
Version 1.1
NextCore RN50 User Guide
20
Содержание NextCore RN50
Страница 1: ......







































































