





























105
Chapter 5: Maintenance and troubleshooting
BenchCel Microplate Handling Workstation R-Series User Guide
Diagnostic tools
About this topic
The BenchCel Diagnostics software has three tabs: Controls, General
Settings, Profile. You use the command and parameters available in the
Controls and General Settings tabs when troubleshooting problems.
This topic explains how to use the commands and parameters in the
Controls and General Settings tabs to do the following:
❑
“Sending the robot to the home position” on page 105
❑
“Homing the robot” on page 106
❑
“Disabling and enabling the robot motors” on page 106
❑
“Jogging the robot” on page 107
❑
“Changing the robot speed” on page 108
❑
“Moving plates between teachpoints” on page 110
❑
“Locking and unlocking stacks” on page 111
❑
“Opening and closing clamps” on page 113
❑
“Extending and retracting shelves” on page 114
❑
“Changing labware parameters” on page 115
❑
“Changing the general settings” on page 121
See “Quick reference” on page 155 for the complete list of available
commands you can use.
Sending the robot to
the home position
The home position is where the robot head is at the center of the
BenchCel device and the robot arms are perpendicular to the x-axis.
You send the robot to the home position if you want the robot out of the
way in a safe position.
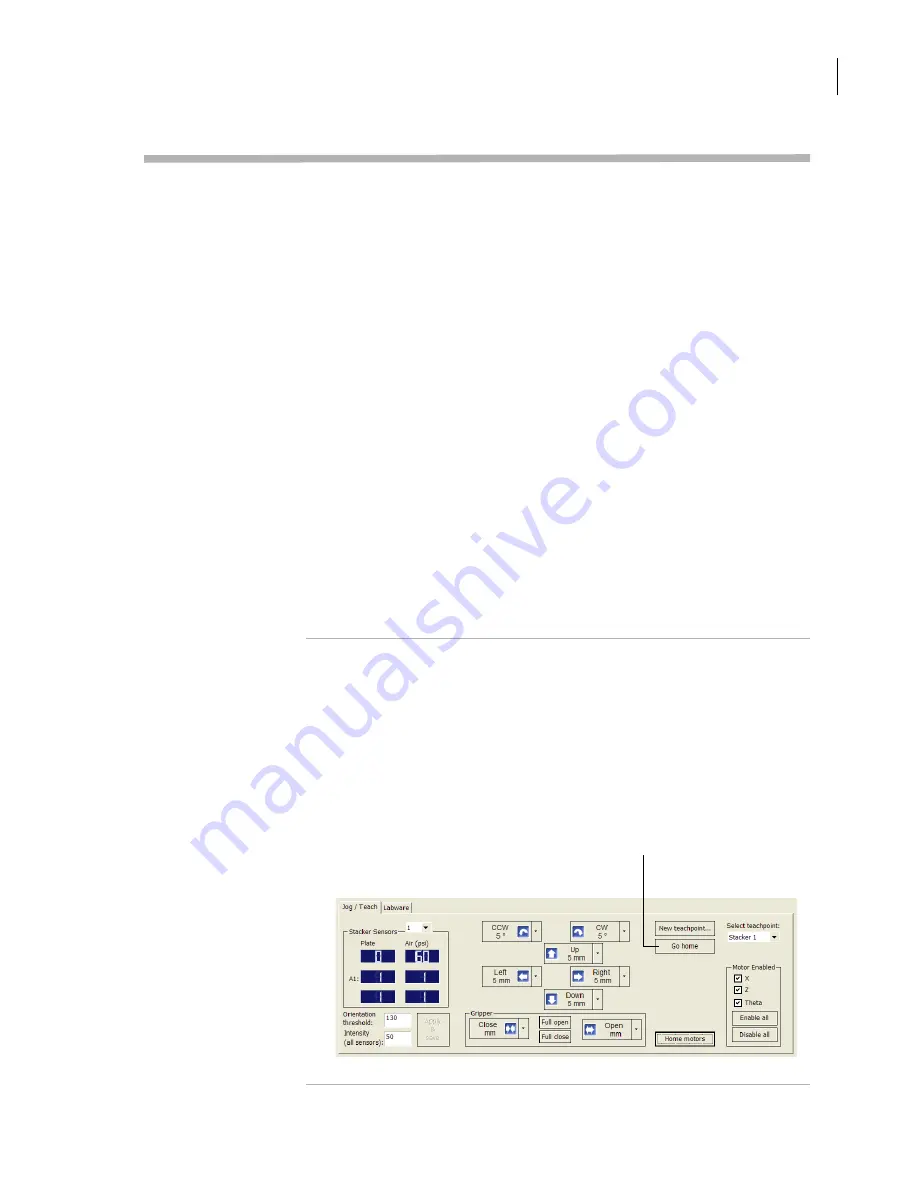
To send the robot to the home position:
1.
In the
Controls
tab, click
Jog/Teach.
2.
Click
Go Home.
Click to send the robot to
its home position.
Содержание R Series
Страница 4: ...Letter to our Customers 2 Agilent Technologies Inc Automation Solutions Division ...
Страница 10: ......
Страница 23: ......
Страница 24: ......
Страница 26: ......
Страница 34: ...Preface BenchCel Microplate Handling Workstation User Guide viii ...
Страница 60: ...Chapter 1 Introduction BenchCel Microplate Handling Workstation R Series User Guide 26 ...
Страница 124: ...Chapter 4 Performing a run BenchCel Microplate Handling Workstation R Series User Guide 90 ...
Страница 188: ...Appendix A BenchCel ActiveX control BenchCel Microplate Handling Workstation R Series User Guide 154 ...
Страница 210: ...Appendix B Quick reference BenchCel User Guide 176 ...
Страница 218: ...Index BenchCel Microplate Handling Workstation R Series User Guide 184 ...
Страница 219: ......
Страница 220: ...Agilent Technologies User Guide G5400 90001 ...





















































