




























2.2. Securing the Hexapod to the Mounting Surface
DANGER: Mechanical Hazard!
Personnel must be made aware of the mechanical hazards during set up or when you
do service to the stage.
l
Do not manually move the hexapod if it is connected to a power source.
l
The stage must be mounted securely. Improper mounting can result in injury and
damage to the equipment.
l
When you move the tabletop manually to do maintenance, this could expose the
operator to pinch points. Refer to
on
The mounting surface must be flat and have adequate stiffness to achieve the maximum
performance from the hexapod. When it is mounted to a non-flat surface, the stage can be distorted
while the mounting screws are tightened. This distortion will decrease overall accuracy. Adjustments
to the mounting surface must be done before the stage is secured.
Inspect the mounting surface for dirt or unwanted residue and clean if necessary. Use precision
flatstones on the mounting surface to remove any burrs or high spots. Clean the mounting surface
with a lint-free cloth and acetone or isopropyl alcohol and allow the cleaning solvent to completely
dry. Gently place the stage on the mounting surface.
IMPORTANT
: The hexapod is precision machined and verified for flatness at the
factory.
l
Do not machine the hexapod housing. If you must machine a surface to achieve a
required flatness, machine the mating mounting surface.
l
Keep the use of shims to a minimum when you mount the hexapod to the mounting
surface. The use of shims could reduce the rigidity of the system.
IMPORTANT
: To maintain accuracy, the mounting surface must be flat to within 0.0127
mm over the contact area.
A minimum of six M8 mounting screws are required to mount the hexapod to the mounting surface.
Refer to
or
for mounting locations and
for tightening
torque values.
Hardware Manual
HEX500-350HL
www.aerotech.com
25
Содержание HexGen HEX500-350HL
Страница 1: ...Revision 2 01 HexGen HEX500 350HL Hexapod Six DOF Positioning System HARDWARE MANUAL...
Страница 16: ...This page intentionally left blank HEX500 350HL Hardware Manual 16 www aerotech com...
Страница 22: ...This page intentionally left blank HEX500 350HL Hardware Manual 22 www aerotech com...
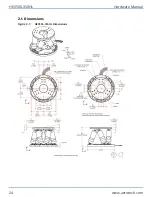
Страница 24: ...2 1 Dimensions Figure 2 1 HEX500 350HL Dimensions HEX500 350HL Hardware Manual 24 www aerotech com...
Страница 34: ...Figure 3 2 Motor and Feedback Wiring E3 Connector HEX500 350HL Hardware Manual 34 www aerotech com...
Страница 39: ...Figure 3 5 Encoder Phasing Reference Diagram Standard Hardware Manual HEX500 350HL www aerotech com 39...
Страница 40: ...This page intentionally left blank HEX500 350HL Hardware Manual 40 www aerotech com...
Страница 44: ...This page intentionally left blank HEX500 350HL Hardware Manual 44 www aerotech com...
Страница 48: ...This page intentionally left blank HEX500 350HL Hardware Manual 48 www aerotech com...







































































