





























15
Chapter 2
2.3.3 ORG
This is the Origin point input. If this signal becomes active during origin
return (refer to the control select modes), pulse output stops immediately.
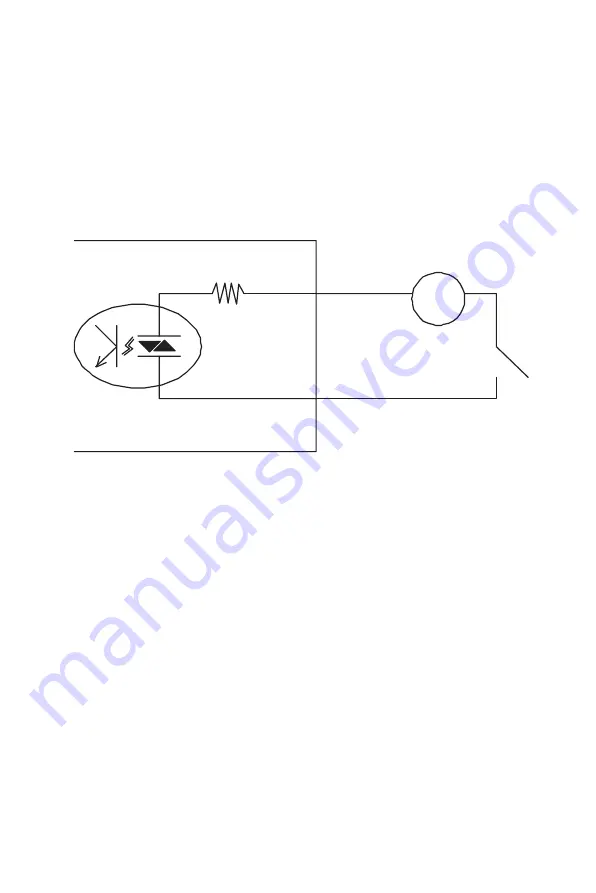
Although PCI-1243U caters for five limit switches on each axis, not all of
them have to be operated in one application. Refer to following figure for
an example of the usage of limit switches.
Figure 2.9: ORG Switch Test Configuration
nORG
nLCOM
nLCOM = ALCOM / BLCOM / CLCOM / DLCOM
V
nSwitchIn = xLIM+ / xLIM- / xSD+ / xSD- / xORG
(4.7k)
V = 12 ~ 24 V DC
Содержание PCI-1243U
Страница 1: ...PCI 1243U 4 Axis Stepping Motor Control Card User Manual ...
Страница 8: ...PCI 1243U User Manual viii ...
Страница 14: ...PCI 1243U User Manual 6 ...
Страница 35: ...27 Chapter3 Figure 3 8 Point to Point Movement ...
Страница 38: ...PCI 1243U User Manual 30 ...
Страница 80: ...PCI 1243U User Manual 72 Appendix A Diagrams A 1 Jumper and Switch Layout ...
Страница 82: ...PCI 1243U User Manual 74 ...
Страница 88: ...PCI 1243U User Manual 80 ...







































































