














Q2BYG403MD Driver User’s Manual
-13-
Chapter IV. FAQ
4.1 Motor selection
Q2BYG403MD is suitable for 4, 6, 8-wire two phase hybrid step motor.
However, to make the motor have optimized running effect, it is usually
required to select appropriate motor to match the Driver.
(1) It is known from the torque-frequency characteristics of the step
motor that the output torque decreases along with the increase of
motor speed. Generally, at light load, the maximum working speed is
below 15 rev/sec, and at heavy load, the maximum working speed is
about 10 rev/sec. If the system has a higher requirement on speed,
please select servo motor.
(2) If step motor is selected, please select the model of appropriate torque
according to the load.
(3) During working, it is allowed to change the system transmission ratio
through gear box and synchronous belt, and thus adjust the
relationship between output torque and load speed.
(4) Increase the supply voltage of the step motor to improve the working
speed of the motor; increase the working current of the step motor to
improve the torque of the motor; increase the subdivisions of the step
motor to improve the precision of motor, and also improve the
stability of the motor, and reduce vibration and noise.
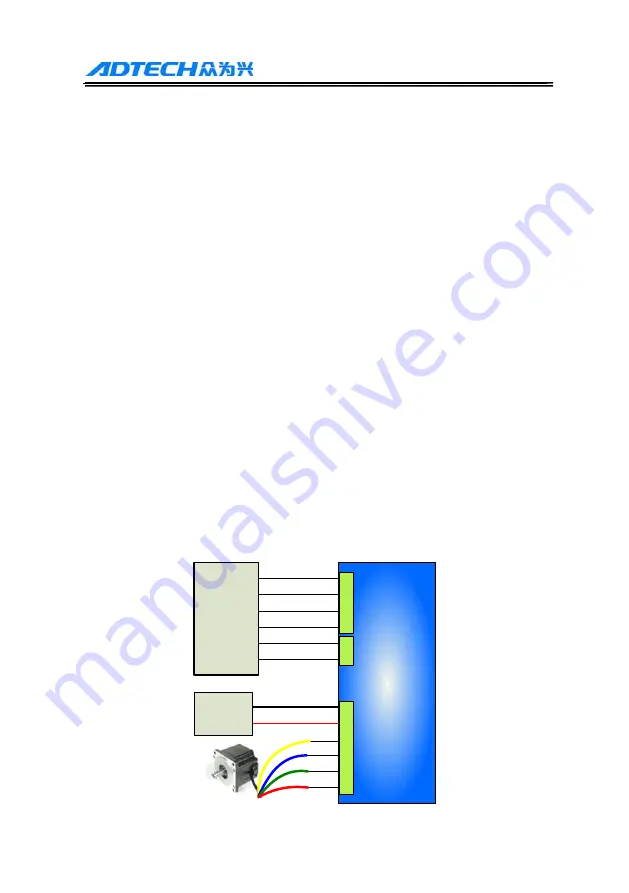
4.2 Typical wiring
The control signal wiring of the controller and Driver can be one of the
three wiring modes shown in 3.3.2. The power supply and motor wiring
is shown below:
Q2BYG403MD
Driver
DR+
DR-
PU-
PU+
EN+
EN-
DC-
DC+
B-
B+
A-
A+
Cotroller
DC power
supply
24-40VDC