
























14
Getting Started
Leading
EDGE COMPUTING
that proper ESD (electrostatic discharge) protection
measures are in place.
3. Connect the DIN-37D terminal board to the PCIe-833x
Series (if applicable) with DSUB 37p cable.
4. Connect the EtherCAT type servo drive and I/O with
Ethernet cables (CAT5e is recommended).
5. Set up the servo or stepper drive with physical limit
switch, zero-positioning, and any essential drive signals.
6. Turn on system power including computer power, rele-
vant terminal board power, and 24VDC power.
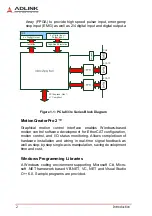
7. Configure EtherCAT communication parameters via
MotionCreatorPro 2™ and 3rd party utility as needed.
8. Verify all I/O signals and servo operations via MotionCre-
atorPro 2™.
Troubleshooting:
If the computer fails to power up normally or the motion control
system operates abnormally after system installation, follow the
steps listed for troubleshooting. If the problem persists, please
contact your dealer for technical services.
WARNING:
Please ground the shielding end of the power
terminal to reduce risk of electric shock and
ensure product operation of electric appliances.
Please disconnect the motor drive from its load
before using the card for the first time. Do not
connect the motor drive to any mechanical
devices before completion of the installation and
fine tuning of the control system. Connect the
system only after the board is adjusted and the
drive parameters can control the motor.
Содержание PCIe-8332
Страница 8: ...viii List of Tables Leading EDGE COMPUTING This page intentionally left blank ...
Страница 10: ...x List of Figures Leading EDGE COMPUTING This page intentionally left blank ...
Страница 22: ...12 Introduction Leading EDGE COMPUTING This page intentionally left blank ...
Страница 26: ...16 Getting Started Leading EDGE COMPUTING ...
Страница 36: ...26 Important Safety Instructions Leading EDGE COMPUTING This page intentionally left blank ...