HiPAP
®
and HPR used in plough
and tow fi sh tracking
Tow fi sh tracking
855-164074 / Rev.E / October 2003
Introduction
The HiPAP
®
system may work down to 4000 meters.
The HPR Super-Short Base Line (SSBL) systems
(HPR 309, HPR 310 and HPR 410) may work down
to 2000 meters using high power, deep-water trans-
ponders. These fi gures are based on a “normal” noise
level in the surroundings of the vessel and suffi cient
source level from the transponder. “Looking” through
the propeller water and having to “look” through the
water column at a slanted angle, will often create limi-
tations to the actual range performance.
In general, the most important factors for getting suc-
cessful positioning results in underwater navigation
are:
• No ray-bending or defl ection, due to different tem-
peratures in the water column.
• The best possible Signal-to-Noise ratio (S/N).
• No obstructions or aerated water between the seabed
transponder and the hull mounted transducer.
Ray-bending
Kongsberg Maritime has many
years of experience in handling
these factors. In plough and tow
fi
sh tracking applications, the
point about defl ection is unique,
as the positioning will be rela-
tively more horizontal than in
other applications. Please note
that there is no ray-bending effect
when the acoustic signal com-
munication is vertical through the
layers.
The ray-bending effect will start infl uencing the accu-
racy of the positioning when the angle to the trans-
ponder is 15-20 degrees (relative to vertical), and will
normally increase with increasing angles.
Kongsberg Maritime has developed different solu-
tions to minimize the ray-bending effect.
The HiPAP / HPR system has:
• Functions to calculate the sound defl ection through
water, and software to compensate the error caused
by this effect. Both range and angle detection are
compensated.
• Possibilities for taking input from a sound velocity
meter, and a dedicated program will calculate and
display the ray-bending graphically on the display.
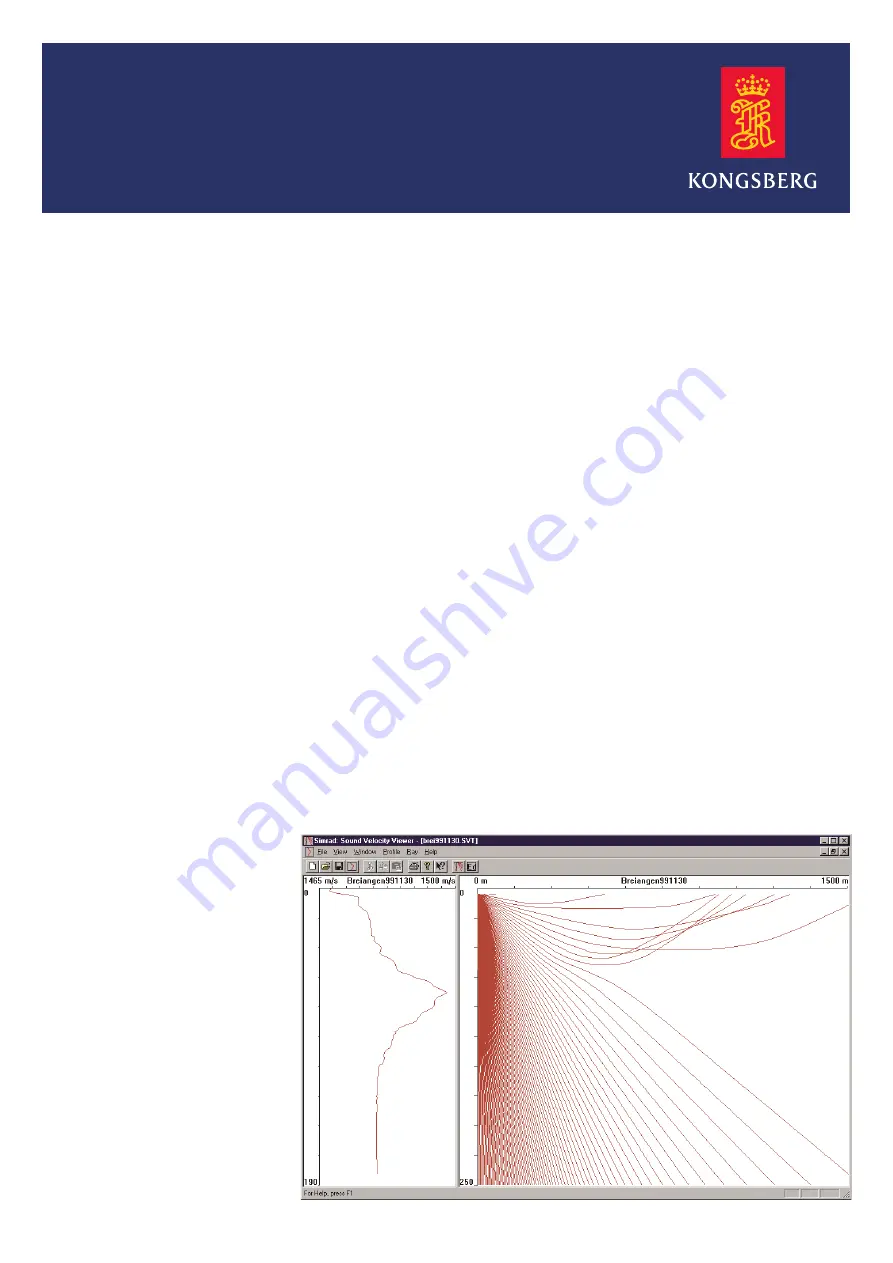
An example of operator presentation of the sound
velocity profi le of the whole water column, and the
presentation of ray-bending diagram calculated by the
HPR, is presented in the fi gure below.