ZMC432 Motion Controller User Manual V1.5
3.9.
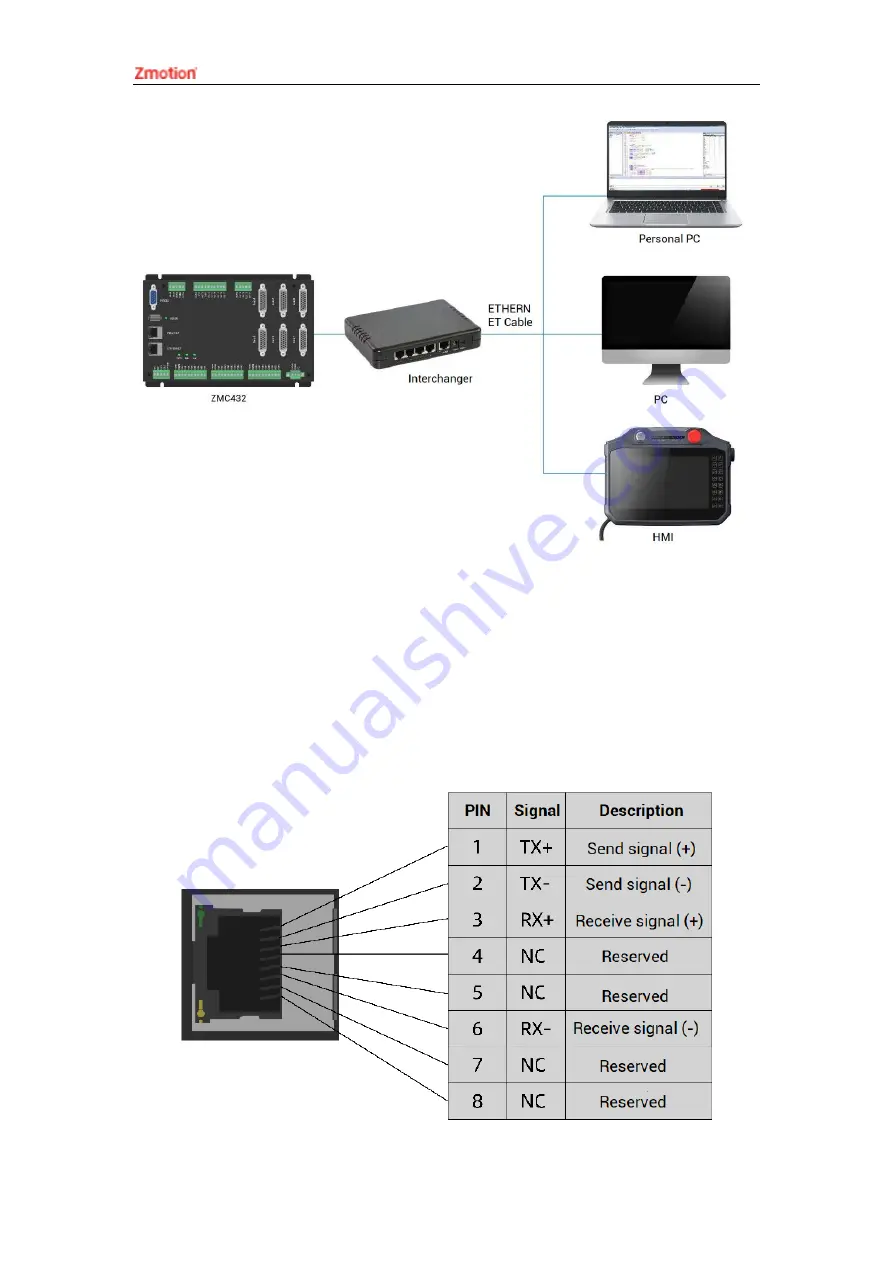
EtherCAT Bus Interface
ZMC432 motion controller has a 100M EtherCAT communication interface, and it
supports EtherCAT protocol. In addition, EtherCAT driver or EtherCAT expansion module
can be connected. The pin definition is as follows: