

















1-1
188791-1
188791-1
1
General Information
1.1 Introduction
Smart Series HC10DT
Collaborative Robot
1
General Information
1.1 Introduction
This is a YASKAWA Smart Series HC10DT Collaborative Robot Quick
Start Guide for Robots that have Smart Pendant Version 1.3.5 and newer.
This document is intended to guide the user through a basic installation
and setup of the Robot and the user to perform basic moves to confirm
setup was successful. A complete set of manuals is provided and are to
be reviewed by all working with or near the Robot.
1.2 Safety
Before installing and powering on the Robot, be sure to read and
understand all safety information. Refer to the safety sections of all
included manuals. All YASKAWA manuals are included on a USB.
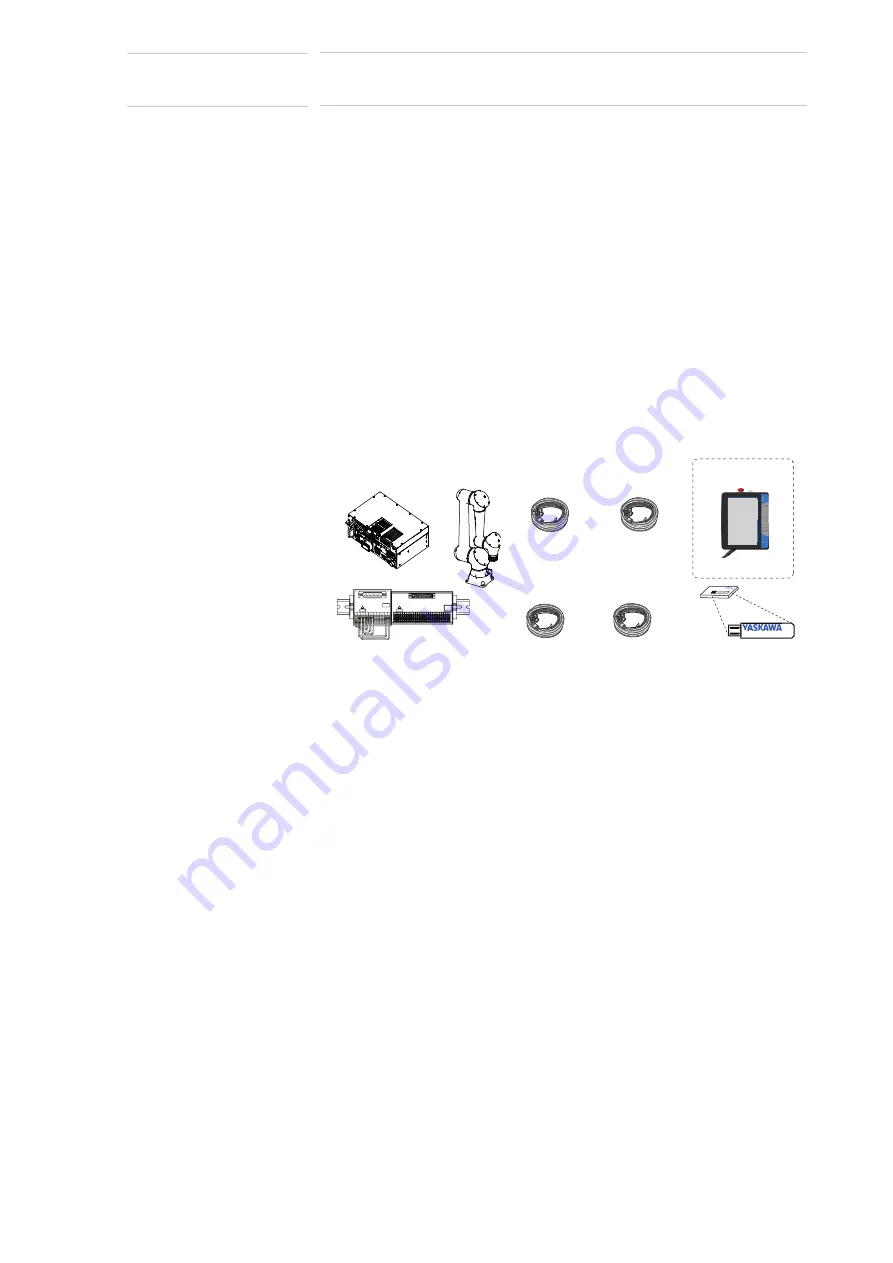
1.3 Robot Assembly
Fig. 1
-
1: Robot Assembly Includes:
1.4 Training
YASKAWA recommends users complete the free online courses listed
below before proceeding to the next sections:
– HC10 w/wo DT YRC1000micro Controller w/ Smart Pendant
– Intro to Robotics
– Yaskawa Safety Principles
1.4.1 How to Access Free Online Training
1. Go to “YASKAWA Academy Catalog”
https://yaskawaacademy.myabsorb.com/#/catalog/
2. Press the {$0.00} located underneath each of the desired courses to
add them to the “Cart”
3. Review the items in the Cart and press {Proceed to Checkout}
4. Follow instructions to “Sign In” or “Sign Up”
• An activation link is sent to the email address on file, if signing up for
the first time
5. Enrolled courses can be found in “My Courses” on the dashboard, or
at
https://yaskawaacademy.myabsorb.com/#/courses
6. Use {Start} to begin the course
Smart Pendant
Manipulator
YRC1000micro
USB
Robot Manual
READ ONLY MEMORY
R b
M
l
Robot Manual
R b t M
l
Base I/O
Cable
25
13
14
1
1 2 3 4 5 6 7 8 9 10 11 12 13
XXXXXX
CN3
3
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
20 21 22 23 24
XXXXXX
25 26
CN4
3
Terminal Blocks for Safety I/O (Left)
General Purpose I/O (Right)
CN3 Safety Cable
CN4 GPIO Cable
Switch/Lamp
Cable
Torque Sensor
Cable
Manipulator
Cable







































































