





























11.4 Monitoring an External Encoder
11.4.1 Option Module Required for Monitoring
11-10
11.4
Monitoring an External Encoder
You can monitor the current value of an external encoder attached to a machine without creat-
ing a fully-closed loop.
A dual encoder system with an encoder in the Rotary Servomotor and an external encoder
attached to the machine is used, but only the encoder in the Rotary Servomotor is used in the
control loop.
The external encoder is used only to monitor the current position of the machine. You can also
use a touch probe to latch the current position of an external encoder.
11.4.1
Option Module Required for Monitoring
A Fully-closed Module (SGDV-OFA01A) is required to use this function.
Refer to the following manual for detailed information on installation.
Σ
-V-Series/
Σ
-V-Series for Large-Capacity Models/
Σ
-7-Series Installation Guide Fully-closed Module (Manual No.:
TOBP C720829 03)
Note: You cannot use a Safety Module (SGDV-OSA01A) if you install a Fully-closed Module.
11.4.2
Related Parameters
The parameter that is used to monitor the external encoder as the current value of the machine
is given below.
Set Pn002 to n.0
(Do not use external encoder) if you will not use fully-closed loop con-
trol.
11.4.3
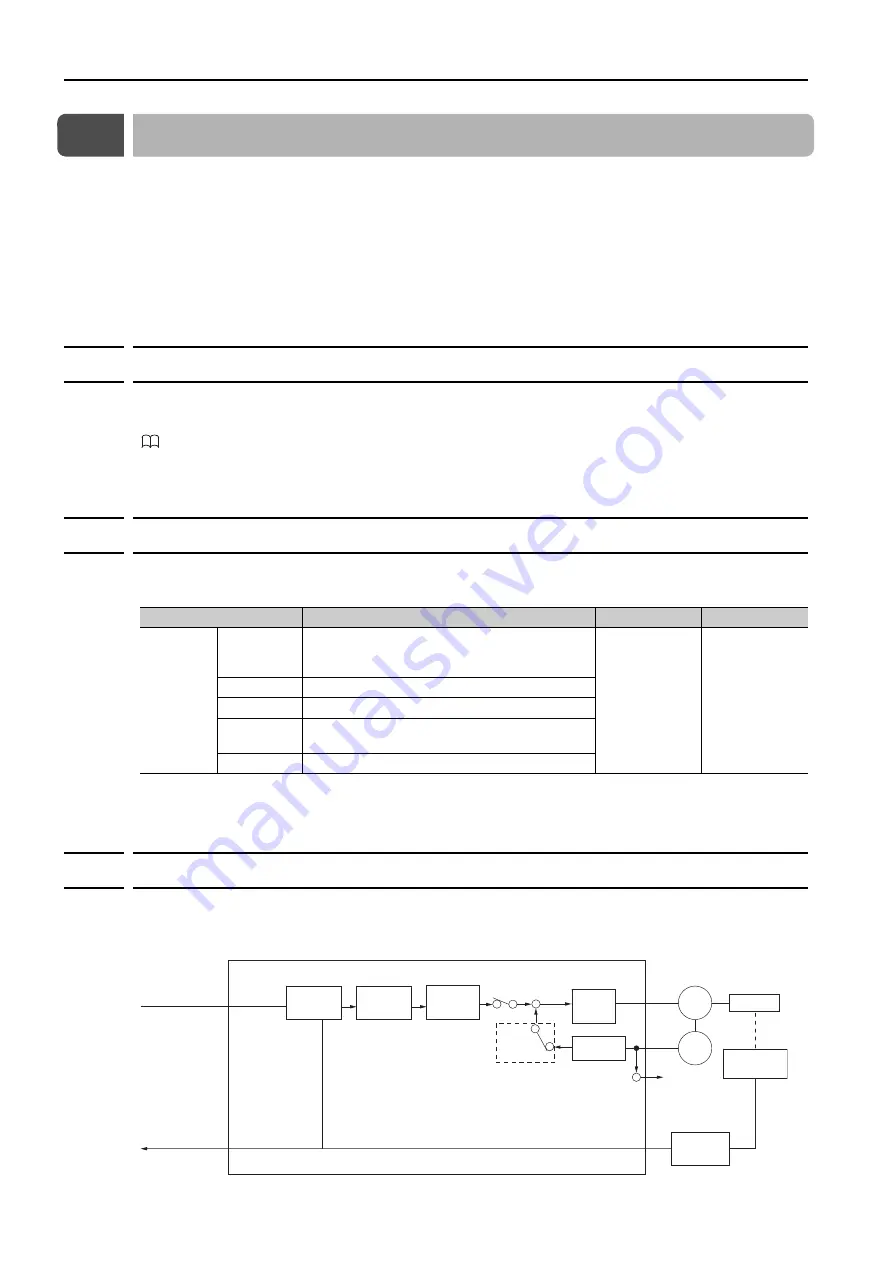
Block Diagrams
A simple block diagram is given below to provide an overall image of monitoring an external
encoder.
Parameter
Meaning
When Enabled
Classification
Pn00E
n.0
(default set-
ting)
Do not use the external encoder monitor.
After startup
Setup
n.1
Use CCW as the forward direction.
n.2
Reserved setting (Do not use.)
n.3
Use CW as the forward direction. (Reverse
Rotation Mode)
n.4
Reserved setting (Do not use.)
SERVOPACK
Position reference
−
Motor
ENC
Machine
External
encoder
Serial
conversion
Position
control loop
Alarm
detection
A.d10
Speed
feedback
Pn22A
Speed
loop
Deviation
counter
+
Speed
conversion
External encoder
position
(60E4h: 1)
Unit
conversion
Pn20A







































































