




























9.1 Error Message List
9-15
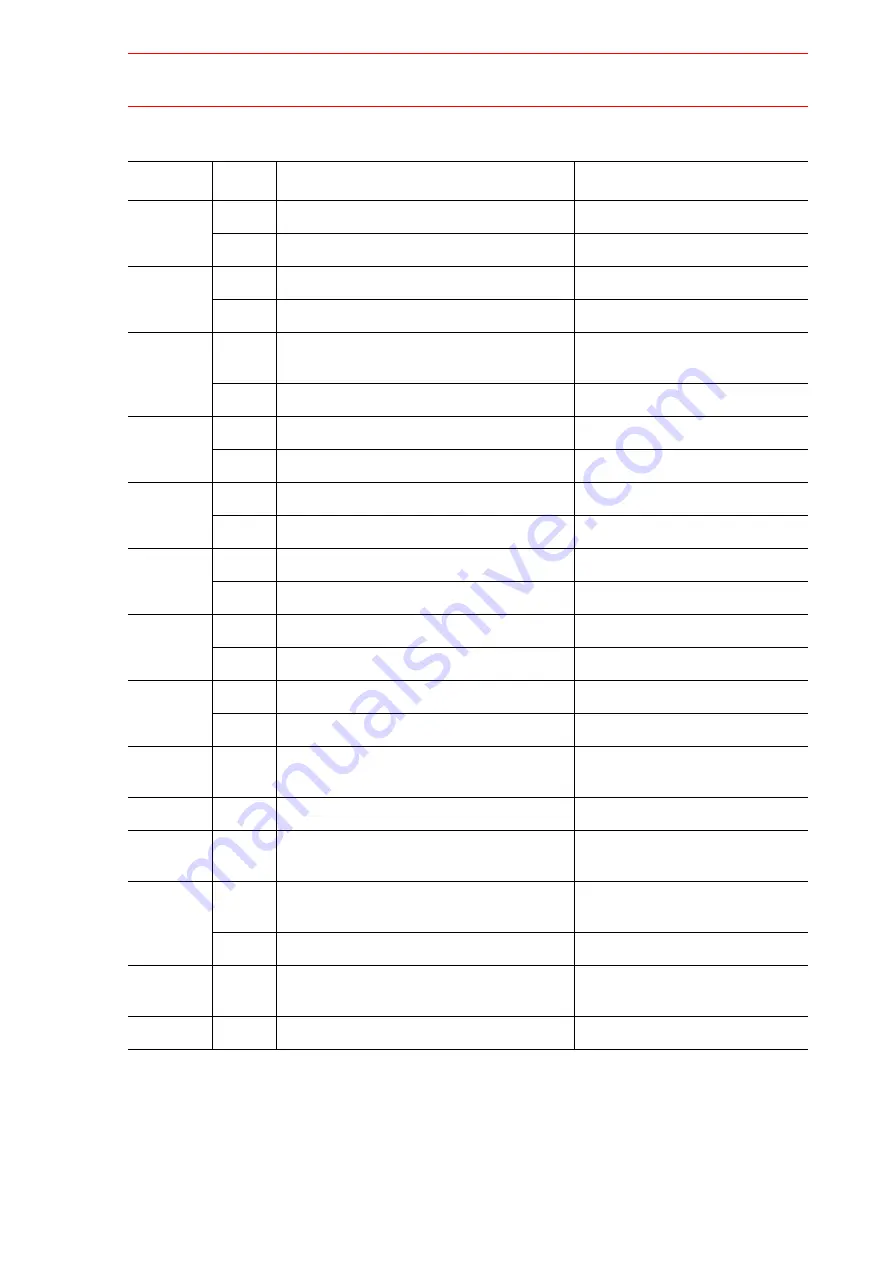
9.1.5
Concurrent I/O
Error No.
Data
Error Message
Contents
4010
∗
Illegal relay No.
XXX
Line No.
4030
∗
Illegal instruction
XXX
Line No.
4040
∗
Relay/register No. duplicated in OUT/
GOUT or arithmetic instruction
Multiple outputs are instructed to
the relay or register.
XXX
Line No.
4050
∗
The relay is not used
XXX
Line No.
4060
∗
Excess STR-[-NOT] instructions
XXX
Line No.
4070
∗
Excess AND [OR] STR instructions
XXX
Line No.
4080
∗
Syntax error in CNT instructions
XXX
Line No.
4090
∗
Enter STR [-NOT] at head of block
Need STR [-NOT]
XXX
Line No.
4120
-
Concurrent I/O memory is full
Exceeds memory capacity
(10000 steps)
4130
-
END instruction not found
END instruction not found
4140
-
Wrong ladder program
Position and number of PART
instruction are wrong.
4150
∗
Wrong use of GSTR, GOUT commands
GSTR and GOUT is not used
together.
XXX
Line No.
4220
-
Excess TMR/CNT or arithmetic instruc-
tions
More than 100 TMR, CNT or
arithmetic instruction used
4230
-
Syntax error in TMR/CNT instructions







































































