























42
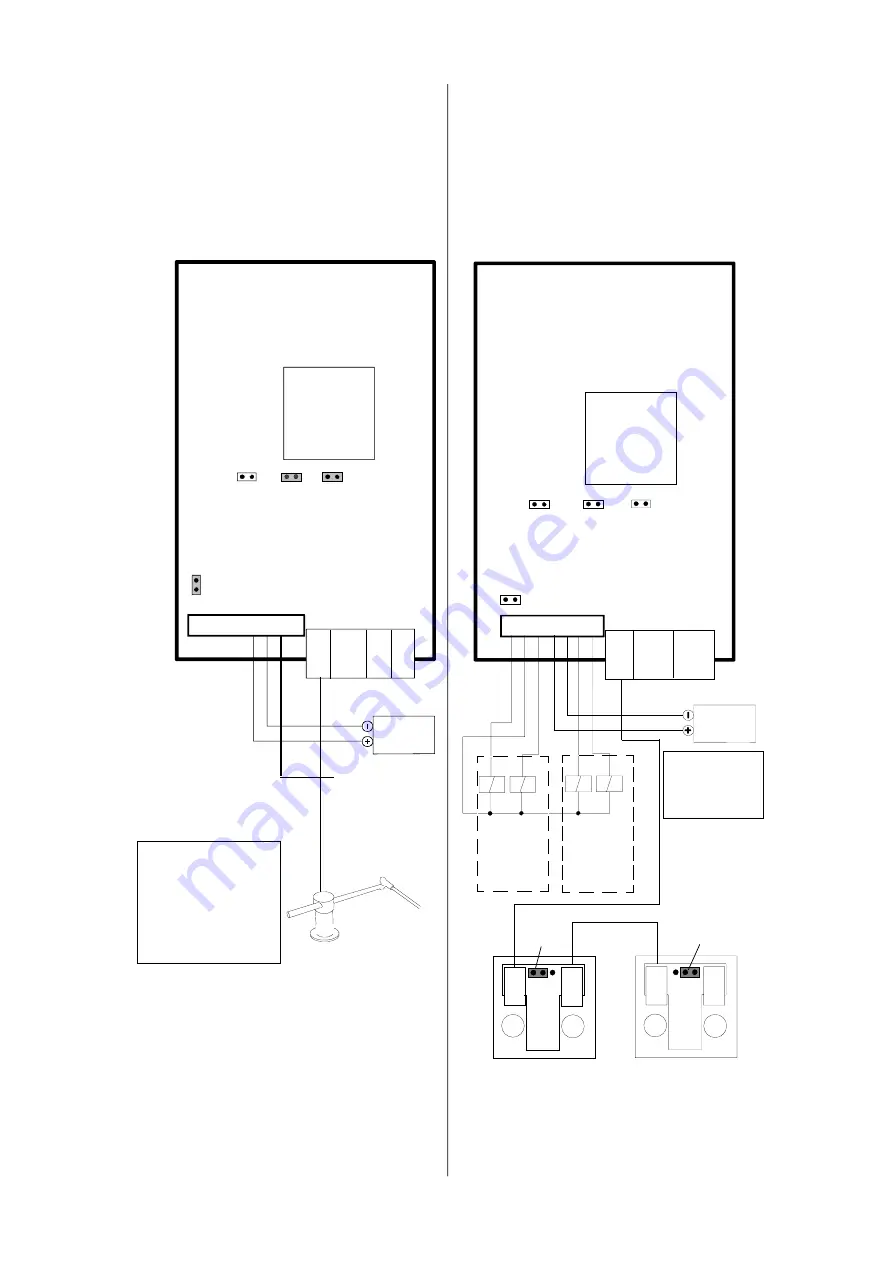
Trim Flap Electronics
With switch over valve
left flap angle
sensor
up
up
open
open
open
Battery
12 or 24V
Jumper
left
Jumper
right
Battery leads:
2 x 2.5 mm
2
down
down
Valve left
flap
Valve
right flap
right flap angle
sensor
open
Jumper 1
Jumper 2 Jumper 3
Trim Computer
(TRIM BOX)
2 3 4 5 6 7 8
Flap
Angle
CAN
Bus
CAN
Bus
Jumper 4
E) with voltage con-
trolled servo valve
The output signal is suitable for proportion-
al valves with up to 20% hysteresis (e.g Dan-
foss Type PVEM).
closed
open
Rudder Angle
Sensor
Battery
12 to 24 V
UDC
Jumper 1 may be closed to reverse the
measured rudder angle; but the easier way is
altering A0 in the AP setup menu
closed
Battery leads:
2 x 0.5 mm
2
(AWG20)
closed
Jumper 1
Jumper 2 Jumper 3
Jumper 4
1 2 3 4 5 6 7 8
Autopilot Com-
puter
(DRIVEBOX)
Rudd.
Angle
CAN-Bus
+ NMEA
AUX-1 AUX-2
Output Signal: UDC/2
+/- 25%UDC (output
impedance = 1kOhm)
Set A5=08, A5*=01,
A0*=01; use A4*=0/1
for inverse signal; use
A1=0/1 to adjust idle
signal by 1% up







































































