Pg. 2
v.1.1
2.
Overview
The X PlusOne is a hybrid platform that is capable of hovering and forward flight. The X PlusOne takes off, hovers,
and lands like a traditional quadcopter, but that's where the similarities with a multi-rotor stop. The key
differentiator is this: In place of the quadcopter frame is an upward facing wing. This allows the X PlusOne to pitch
over 90 degrees and fly nose-first at over 60 mph (100 km/h), twice as fast as a traditional quadcopter! Flight
control is handled by varying motor speed to provide pitch, roll, and yaw control, even in forward flight
mode. There are no traditional flight control surfaces on the X PlusOne. Thereby saving weight and complexity
and ensuring the overall design remains clean and efficient.
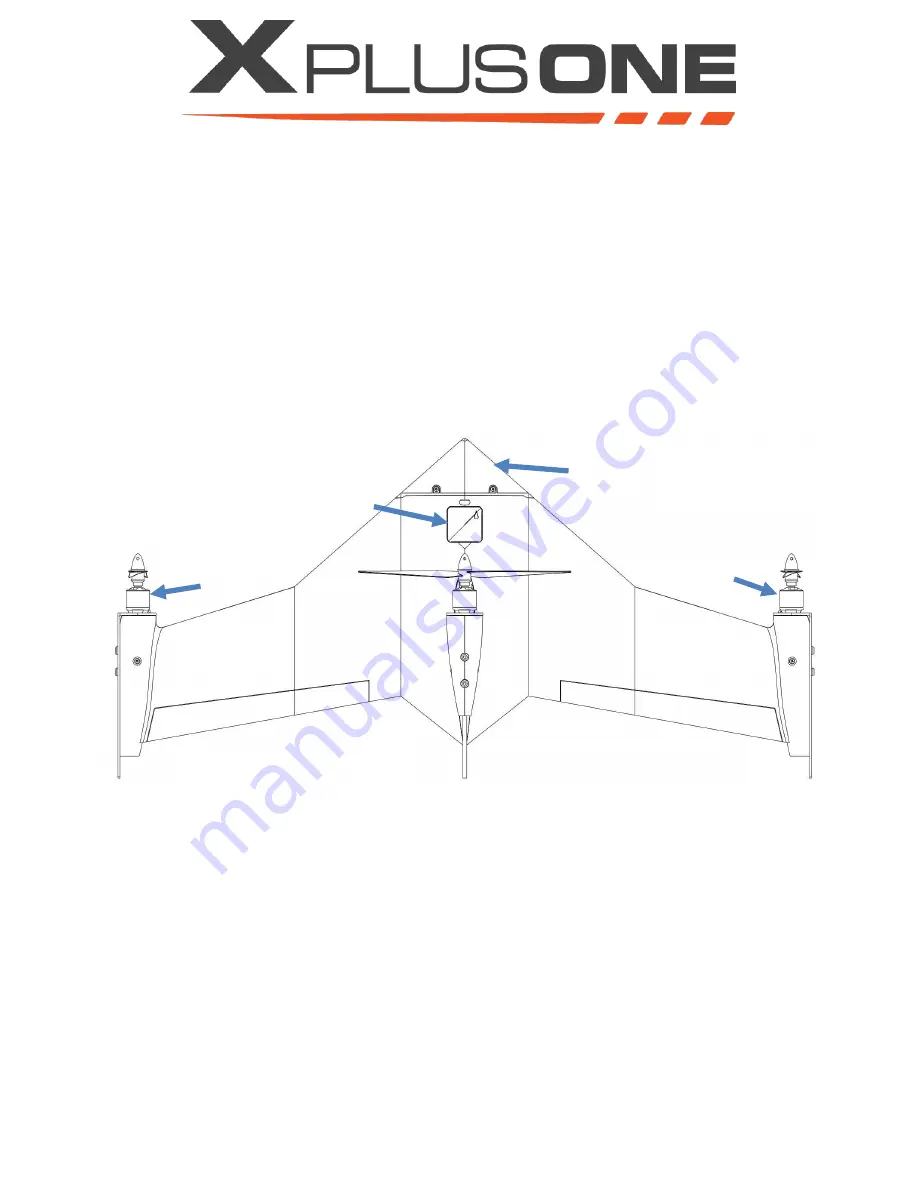
All components will be defined as though the X PlusOne is in forward flight. The following images have the major
components labeled the way they will be referenced.
top view
left motor
right motor
left wing
right wing
payload (standard nosecone)
GPS antenna (Platinum option)
front/nose
back/tail