








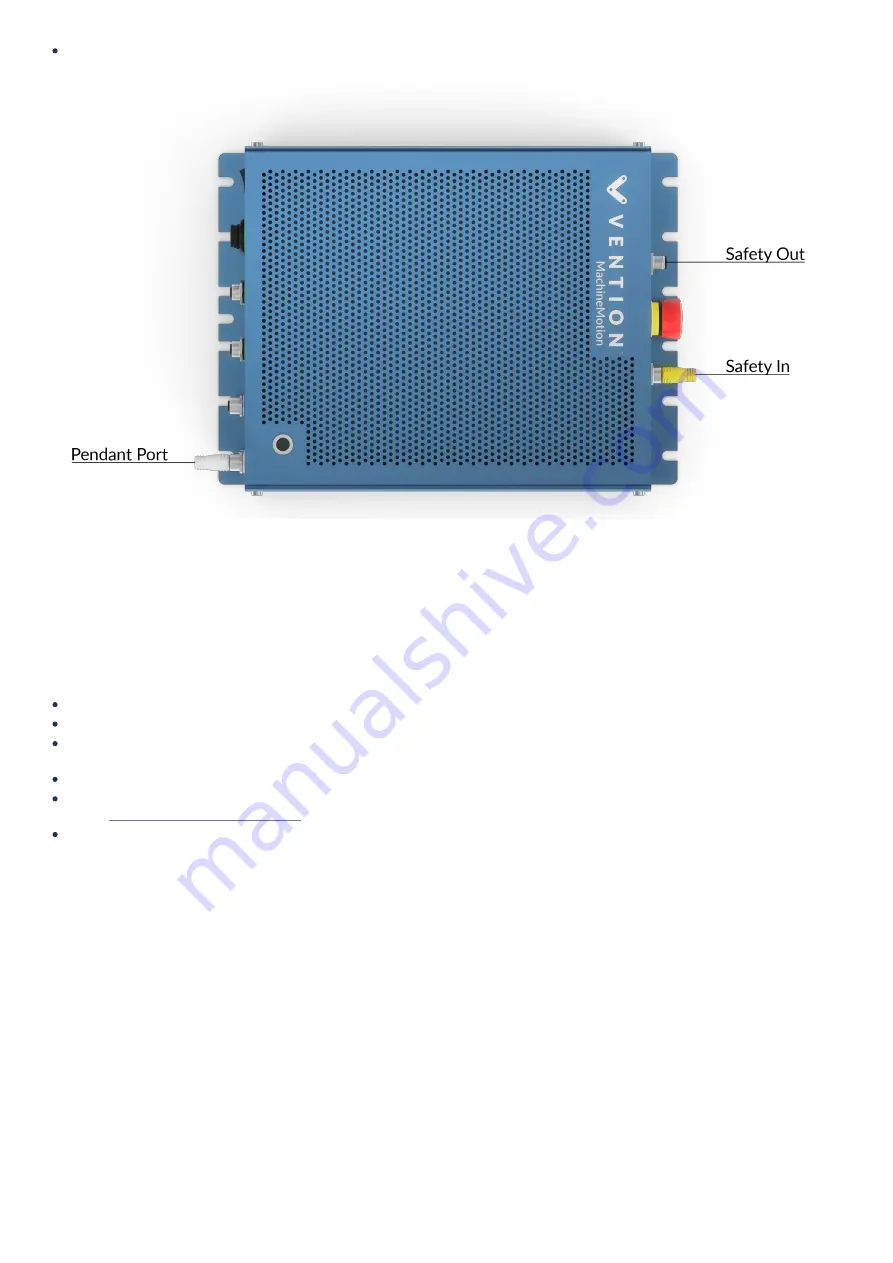
If you are not using a pendant, insert the white jumper in the pendant plug on the front panel of the MachineMotion
MachineMotion with safety jumpers
MachineMotion Behavior in Emergency Stop Mode
The emergency stop mode is engaged either by an E-stop button (located on the MachineMotion controller or on the pendant), the SAFETY IN port or a
software E-Stop.
When MachineMotion enters the emergency stop mode:
The SAFETY OUT dry contact opens
The motors drive loses power, and the motors are not powered anymore
The IO modules and encoders connected to the AUX ports do not lose power; the outputs conserve the same logical state as they were before the
emergency stop
The brakes, connected to an AUX port, lose power and lock the axis
MachineLogic program keeps executing in the background, but no drives will be engaged. However, there is a way to terminate the program (refer to the
section:
MachineLogic Software Termination
)
Python programs will keep executing, but you can control the behavior of your application upon E-stop using the
function bindeStopEvent(callback_function)
MachineLogic Software Termination and IO Sate
To terminate the application after an emergency stop event in MachineLogic, you must monitor the estop topic in the MachineLogic program, then use the
“Terminate” instruction.
This will also allow you, for example, to reset the outputs to a safe states before stopping your application. To do so, in your application, follow the
instructions below and refer to the image of the MachineLogic:
1. Create a child sequence named “E-stop Monitor”
2. Set the sequence type to sequence
3. Click on Add Wait, then use the drop down menu to select Wait for Event
4. Add “estop/status” to the Topic text box and “true” to the Message text box
5. Add the Stop All Motion instruction
6. Set outputs to the desired safe state
7. Add the Terminate instruction





















































