





























WARNING
1. Make sure to use the correct installation settings (e.g. Robot mounting
angle, weight in TCP, TCP offset). Save and load the installation files along
with the program.
2. Make sure that the TCP settings and the robot mounting settings are set
correctly before operating the
Freedrive
button. If these settings are not
correct, the robot arm will move when the
Freedrive
button is activated.
3. The Freedrive function (
Impedance/Backdrive
) shall only be used in
installations where the risk assessment allows it. Tools and obstacles
shall not have sharp edges or pinch points. Make sure that all personnel
remain outside the reach of the robot arm.
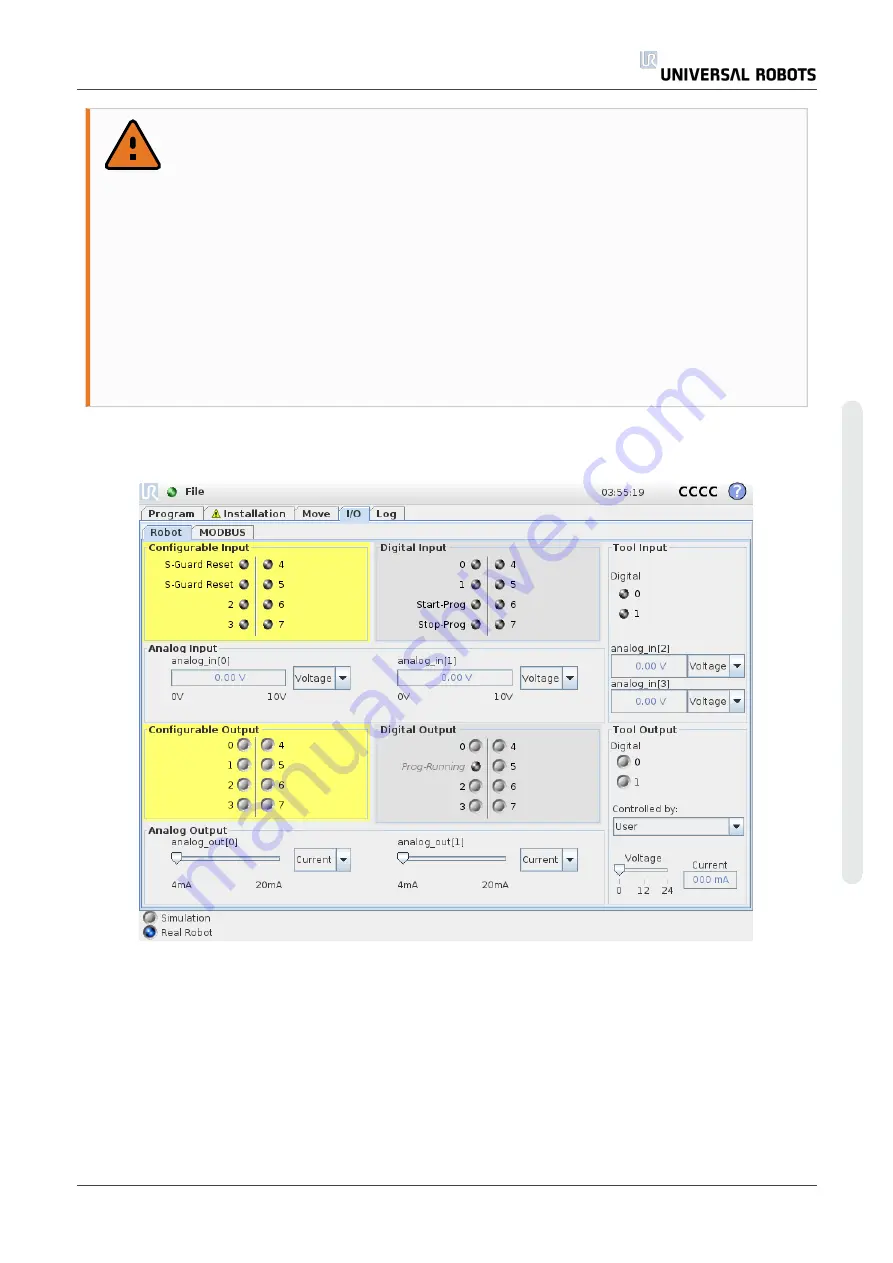
1.23.2. I/O Tab
On this screen you can always monitor and set the live I/O signals from/to the robot control box.
The screen displays the current state of the I/O, including during program execution. If anything
is changed during program execution, the program will stop. At program stop, all output signals
will retain their states. The screen is updated at only 10Hz, so a very fast signal might not
display properly.
Configurable I/O’s can be reserved for special safety settings defined in the safety I/O
configuration section of the installation (see
1.20.13. Safety I/O on page 104
); those which are
reserved will have the name of the safety function in place of the default or user defined name.
User Manual
123
UR10
C
o
p
yr
ig
h
t
©
2
0
0
9
–
2
0
2
0
b
y
U
n
iv
e
rs
a
l
R
o
b
o
ts
A
/S
.
A
ll
ri
g
h
ts
re
s
e
rv
e
d
.
Summary of Contents for UR10/CB3
Page 1: ...Universal Robots User Manual UR10 CB3 Original instructions en...
Page 28: ...UR10 20 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 30: ...UR10 22 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 36: ...UR10 28 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 56: ...UR10 48 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 62: ...UR10 54 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 64: ...UR10 56 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 72: ...China RoHS UR10 64 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 73: ...KCC Safety User Manual 65 UR10 Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 92: ...UR10 84 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 116: ...UR10 108 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 124: ...UR10 116 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 164: ...UR10 156 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...
Page 214: ...UR10 206 User Manual Copyright 2009 2020 by Universal Robots A S All rights reserved...






































































