





























A1 PRO User Manual
Copyright © 2020 Unitree Robotics. All Rights Reserved
25
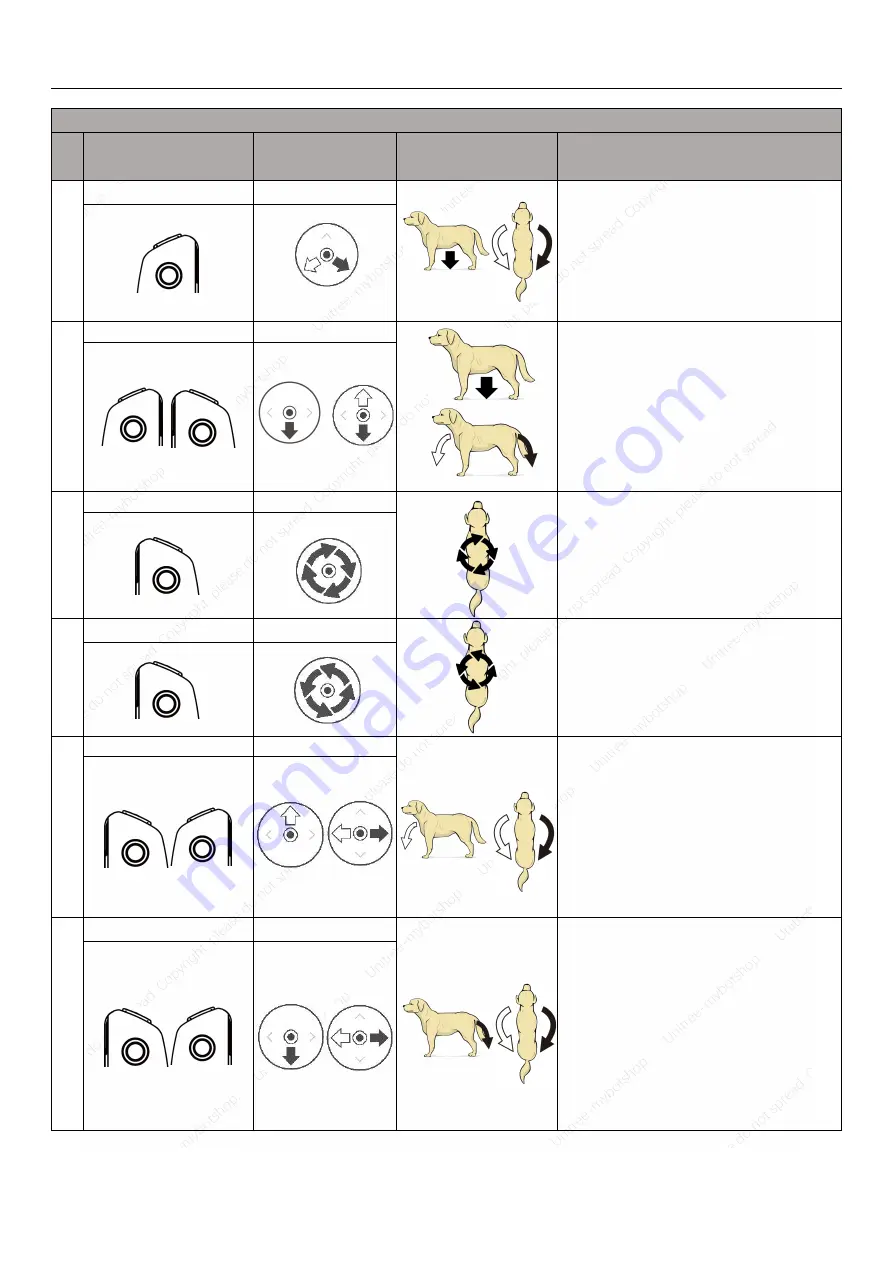
2.Combined Action and Special Action under “Sport Mode”
NO
The Position of Stick or
Button on Joystick
Operation Diagram
Robot Schematic
Remarks
7
Left Stick
Left Stick
When the robot dog is standing in Sport mode, the
left Stick is used to control the robot's jaw and the
body is twisted.
Push stick down and to left, the robot squats while
twisting to left. Push stick down and to right, the
robot squats while twisting to left. The robot is in a
static standing state when it is in the middle position.
The more the stick is pushed away from the center
position, the larger the amplitude.
8
Left Stick
Right Stick
Left Stick
Right
When the robot dog is standing in Sport mode, the
linkage of the left and right Sticks is used to control
the lower jaw of the robot and the front and back of
the body.
Push left stick down and push right stick up, the robot
squats and the body leans forward. Push left stick
down and push right stick down, the robot squats
and the body leans backward. The robot is in a static
standing state when it is in the middle position.
The more the stick is pushed away from the center
position, the larger the amplitude.
9
Right Stick
Right Stick
When the robot dog is standing in Sport mode, the
right Stick is used to control the robot body to make
a clockwise rotation.
Shake the right Stick clockwise to rotate the robot
body clockwise. When in the middle position, the
robot is in a stationary standing state.
The more the stick is pushed away from the center
position, the larger the amplitude.
10
Right Stick
Right Stick
When the robot dog is standing in Sport mode, the
right stick is used to control the robot body to rotate
counterclockwise.
Shake the right Stick counter-clockwise to rotate the
robot body counter-clockwise. When in the middle
position, the robot is in a stationary standing state.
The more the stick is pushed away from the center
position, the larger the amplitude.
11
Right Stick
Left Stick
Right Stick
Left Stick
When the robot dog is standing in Sport mode, the
combination of the left and right Sticks can control
the robot to lean forward and the body to twist.
Push right stick up and push left stick to left, the
robot leans forward and the body twists to the left.
Push right stick up and push left stick to right, the
robot leans forward and the body twists to the right.
The robot is in a stationary standing position in the
middle position.
The more the stick is pushed away from the center
position, the larger the amplitude.
12
Right Stick
Left Stick
Right Stick
Left Stick
When the robot dog is standing in Sport mode, the
combination of the left and right Sticks can control
the robot to lean backward and the body to twist.
Push right stick down and push to left stick left, the
robot leans backward and the body twists to the left.
Push right stick down and push stick to right, the
robot leans backward and the body twists to the
right. The robot is in a stationary standing position in
the middle position.
The more the stick is pushed away from the center
position, the larger the amplitude.
哈哈 哈哈哈 哈哈































































