























ZED-F9P - Integration manual
a few hundred meters of each other. In
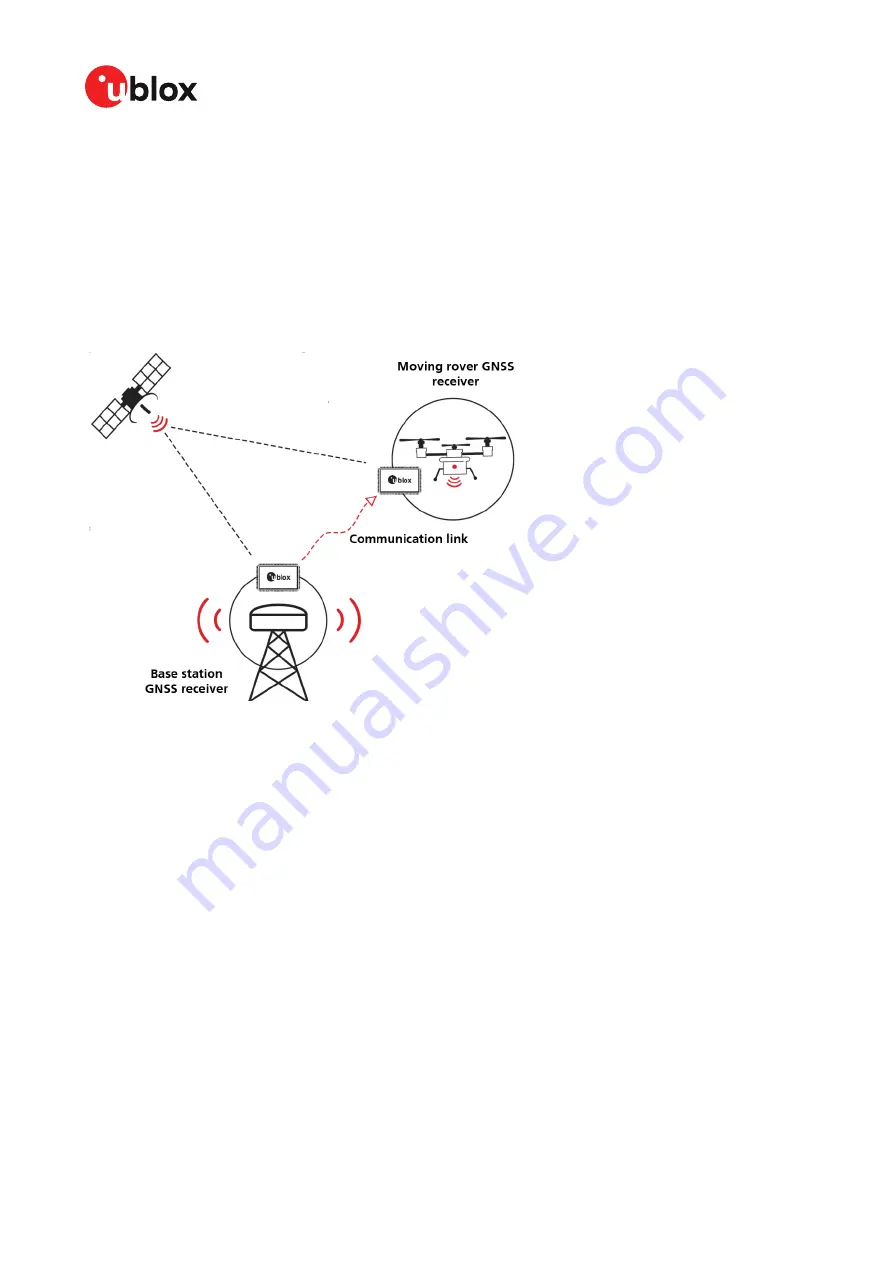
a ZED-F9P is used as a base station
providing corrections to a ZED-F9P rover receiver.
Alternatively, the rover can use corrections provided over longer baselines from a correction stream
distributed as a subscription service. This method can use a single fixed reference source which is
local (within 50 km) to the rover receiver or via a virtual reference service in which corrections are
synthesized for the rovers location.
The moving base feature also enables derivation of the vehicle orientation by mounting two or three
GNSS receivers on the same vehicle platform, i.e. by fixing the position of the GNSS antennas relative
to each other.
Figure 3: ZED-F9P base and rover in a short baseline drone application
UBX-18010802 - R08
2 System description
Page 9 of 110
Early production information