




















your position is our focus
B.4 Communications Interface
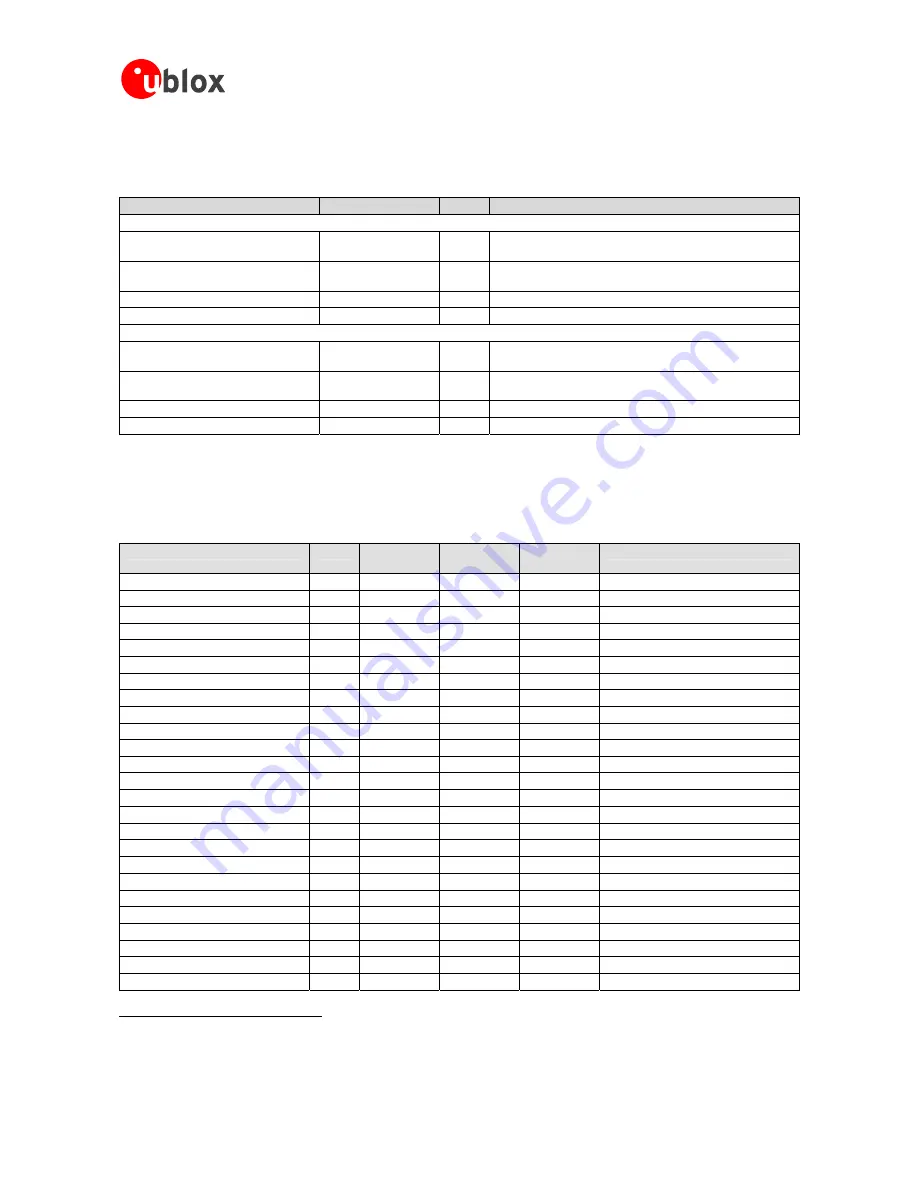
Port Setting (UBX – CFG – PRT)
Parameter
Default setting
Unit
Range/Remark
USART1 (TARGET1)
Protocol
in
0+1+2
–
UBX+NMEA+RTCM
None;
0
–
UBX;
1
–
NMEA;
2
–
RTCM;
12
–
USER0;
13
–
USER1;
14
–
USER2
;
15
–
USER3
Protocol
out
0+1
–
NMEA
+
UBX
None;
0
–
UBX;
1
–
NMEA;
2
–
RTCM;
12
–
USER0;
13
–
USER1;
14
–
USER2
;
15
–
USER3
Baudrate
9600
baud
8
bits,
no
parity
bit
1
stop
bit
Autobauding
Disabled
Enabled
-
Disabled
USART2 (TARGET2)
Protocol
in
0+1+2
–
UBX+NMEA+RTCM
None;
0
–
UBX;
1
–
NMEA;
2
–
RTCM;
12
–
USER0;
13
–
USER1;
14
–
USER2
;
15
–
USER3
Protocol
out
0+1
–
UBX+NMEA
None;
0
–
UBX;
1
–
NMEA;
2
–
RTCM;
12
–
USER0;
13
–
USER1;
14
–
USER2
;
15
–
USER3
Baudrate
57600
/
38400
13
baud
8
bits,
no
parity
bit
1
stop
bit
Autobauding
Disabled
Enabled
–
Disabled
Table 41: Port default settings
B.5 Messages (UBX – CFG – MSG)
UBX
Message
Type
USART1
(TARGET1
14
)
USART2
(TARGET2 )
USB
(TARGET3 )
Range/Remark
NAV-POSECEF
Out
NAV-POSLLH
Out
1
NAV-STATUS
Out
1
NAV-DOP
Out
NAV-SOL
Out
1
NAV-POSUTM
Out
NAV-VELECEF
Out
NAV-VELNED
Out
NAV-TIMEGPS
Out
NAV-TIMEUTC
Out
NAV-CLOCK
Out
NAV-SVINFO
Out
1
NAV-DGPS
Out
NAV-SBAS
Out
NAV-EKFSTATUS
Out
1
RXM-RAW
Out
RXM-SFRB
Out
RXM-SVSI
Out
RXM-RTC
Out
RXM-ALM
Out
RXM-EPH
Out
MON-SCHD
Out
1
MON-IO
Out
1
MON-IPC
Out
MON-MSGPP
Out
13
57600
Baud:
LEA-4P,
LEA-4H,
LEA-4t,
TIM-4P,
TIM-4H
38400
Baud:
LEA-4S,
LEA-4A,
TIM-4A,
TIM-4S
14
The
Number
entered
under
Target1
–
Target2
defines
the
output
cycle:
1
means
every
measurement
cycle,
2
every
2
nd
measurement
etc.
LEA-4R
/
TIM-4R
-
System
Integration
Manual
/
Reference
Design
Default
Settings
GPS.G4-MS4-05043
Page 40







































































