





























EVK-M8L User Guide
UBX-20028627 - R01
Setting up
Page 18 of 33
C1-Public
Figure 7: u-center showing how to save current configuration with UBX-CFG-CFG
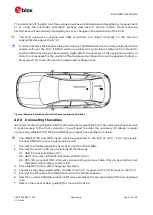
4.4
Configuration and calibration drive
Before the EVK-M8L can use the vehicle’s speed and forward information as well as data from the
integrated sensors (gyroscopes and accelerometers), the receiver must gather calibration
information from a sufficient number of left and right turns. This information needs to be gathered
only once for a particular installation if the ADR configuration parameters are then permanently
stored to flash (see section 4.3.2.3). We recommend that a dedicated co-driver observes the
progress of the calibration drive using u-center.
☞
Although the initialization and calibration process will complete eventually, the sequence below
(illustrated in Figure 8) can be used to achieve more rapid calibration for the purposes of
evaluation.
☞
To ensure quick calibration the driving location needs to have very good GNSS visibility. The
terrain needs to be flat and speed must be high enough.
The calibration time can be improved if the following procedure is carried out:
Drive the car to an open area. An example of a suitable place is a very large, empty parking area. Use
u-center to monitor the process, enable the UBX-ESF-STATUS message.
Phase I. Stop the car, but keep the engine running. Power on the EVK-M8L, for example via USB
to PC. The co-driver should open u-center and enable the messages and views shown in Figure 9.
Wait for a good GNSS position fix. Stand still for another 3 minutes.
Phase II. Start driving a figure-8 pattern (see Figure 8).
Phase III. Drive straight for 500 meters at least 40 km/h.
Phase IV. Drive curves and straight segments for 5 minutes with good satellite visibility. The
segments should include a section where the speed exceeds 60 km/h for at least 10 seconds.
Phase V. This is a continuous fine calibration process running in the background. During this
phase, e.g., the gyroscope temperature compensation table gradually fills in.







































































