





























30
CNT-SVX08F-EN
PID Control
•
What are PID loops?
•
PID calculations
•
Throttling range and gain
•
Calculating gain
•
Sampling frequency
•
Calculaing sampling frequency
•
PID loop action
•
Error deadband
•
Other PID settings
•
Troubleshooting procedure
•
Tips for specific problems
For more details about PID loops, refer to the
PID Control in Tracer Multi-Purpose Controllers
Applications Guide
, (BAS-APG002).
What Are PID Loops?
A PID loop automatically controls an output to maintain a measured value at its setpoint by
monitoring the error (the difference between the measured value and the setpoint). The loop
performs proportional, integral, and derivative calculations to determine how aggressively to
change the output.
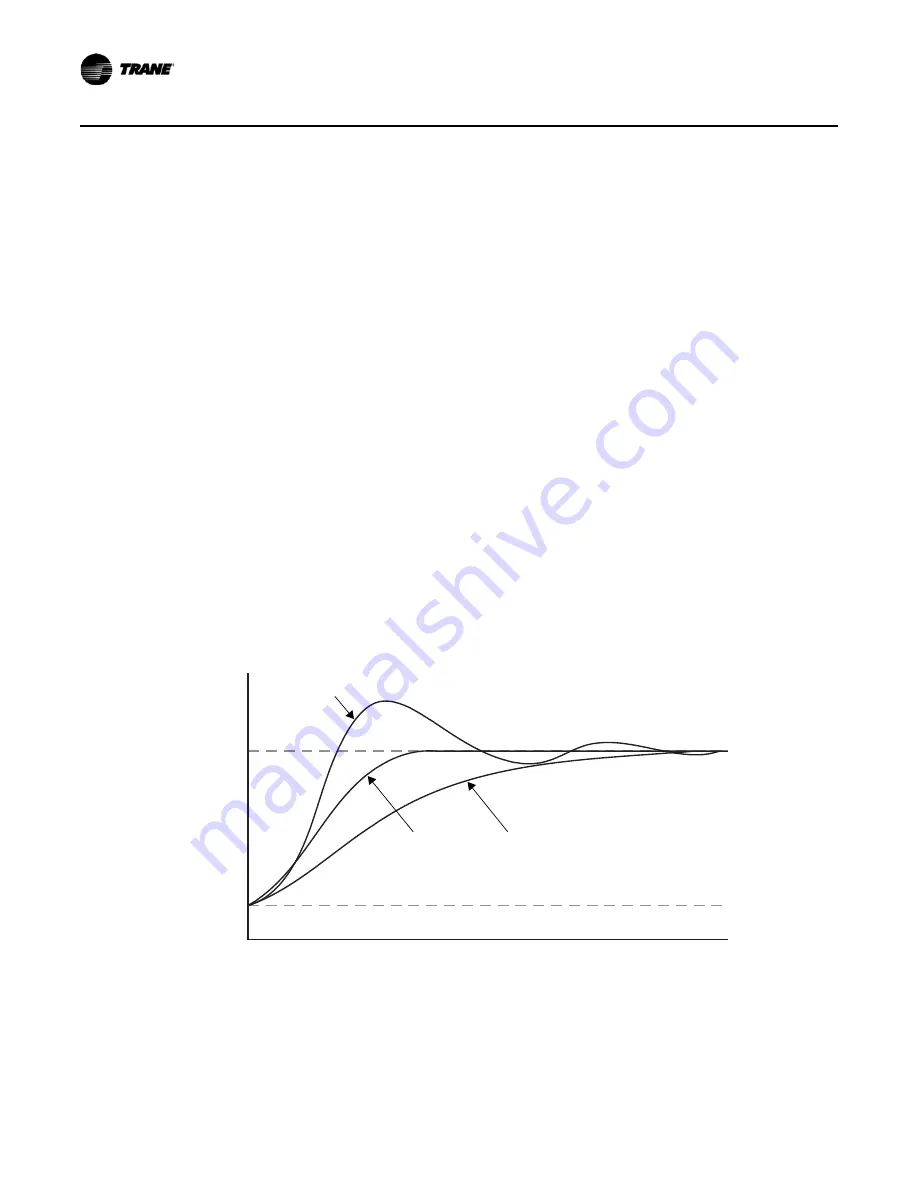
The goal of PID control is to reach the setpoint as quickly as possible without overshooting the
setpoint or destabilizing the system, while maintaining the setpoint consistently over time. If the
system is too aggressive, it overshoots the setpoint as shown in
. If it is not aggressive
enough, the time to reach the setpoint is unacceptably slow.
Figure 13.
The effects of PID aggressiveness
Setpoint
Initial point
Too aggressive (overshoot)
Too slow
Time
Ideal response
Me
asu
red value
In the heating, ventilating, and air-conditioning (HVAC) industry, PID loops are used to control
devices such as valves and dampers. Some common PID applications include:
•
Temperature control
•
Humidity control
•
Duct static pressure control
•
Staging applications







































































