





























TOMATECH AUTOMATION
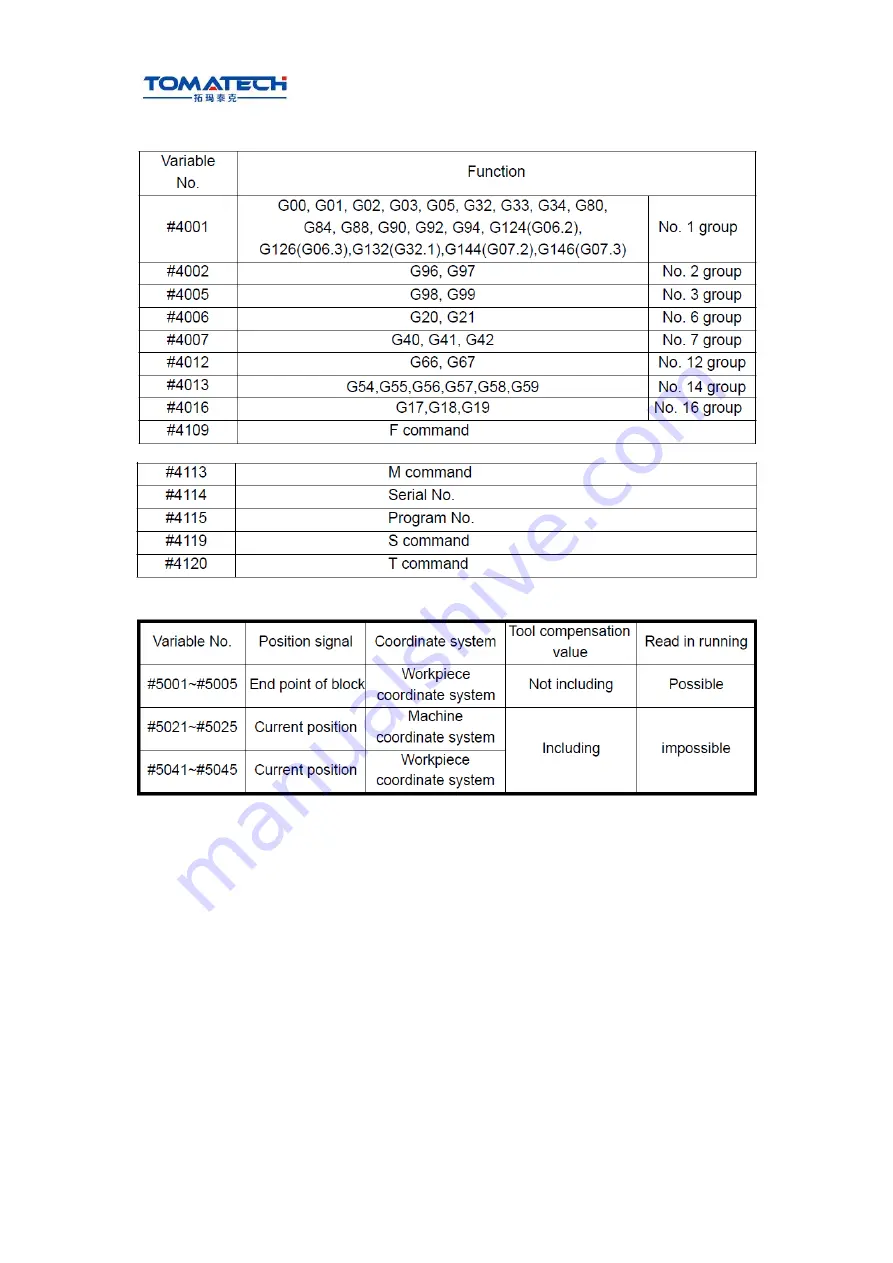
(4) System modal information variable
(5) system variable of coordinate position information:
Note: The position listed in the above table separately corresponds orderly to X, Y, Z, 4
th
, 5
th
axis.
For example:
#5001 meanings to be X position information, #5002 meanings to be Y position information, #5003
meanings to be Z position information and #5004 meanings to 4
th
position information and #5005
meanings to 5
th
position information.
(
6
)
zero offset value and workpiece coordinate systems
G54:#5206 ~ #5210
G55:#5211 ~ #5215
G56:#5216 ~ #5220
G57:#5221 ~ #5225
G58:#5226 ~ #5230
G59:#5231 ~ #5235
Summary of Contents for TAC-100XT
Page 32: ...TOMATECH AUTOMATION...
Page 58: ...TOMATECH AUTOMATION After insert c Insert behind Before insert...
Page 92: ...TOMATECH AUTOMATION Fig 3 19 Example Fig 3 20 rod 125 110...
Page 95: ...TOMATECH AUTOMATION Fig 3 23 Programming Example Fig 3 24 rod 125 112...
Page 137: ...TOMATECH AUTOMATION Fig 3 48 a Cut in method as follows Fig 3 48 b Programming Fig 3 48 b...
Page 145: ...TOMATECH AUTOMATION 1 Operation commands 1 Assignment of macro variables I J G65 H01 P I Q J...
Page 154: ...TOMATECH AUTOMATION Fig 4 7 Imaginary tool nose number in rear tool post coordinate system...
Page 155: ...TOMATECH AUTOMATION Fig 4 8 Imaginary tool nose number in front tool post coordinate system...
Page 158: ...TOMATECH AUTOMATION Fig 4 11 Compensation direction of rear coordinate system...
Page 165: ...TOMATECH AUTOMATION d Special cutting 1 Without intersection...
Page 176: ...TOMATECH AUTOMATION...