





























19
Chapter 4
Standalone Operation
4.1
Introduction
The DC Driver K-Cube has been designed specifically to operate with the extensive
range of Thorlabs DC motorised opto-mechanical products. The unit offers a fully
featured motion control capability including velocity profile settings, limit switch
handling, homing sequences and, for more advanced operation, adjustment of
settings such as lead screw pitch and gearbox ratio, allowing support for many
different actuator configurations. These parameters can be set via the APT Server
software - see Chapter 5. Furthermore, many of these parameters are automatically
set to allow “out of the box” operation with no further “tuning” required.
The following brief overview explains how the front panel controls can be used to
perform a typical series of motor moves. It is assumed that the unit has already been
installed and configured for the particular actuator or stage to which it is associated -
see Chapter 3 for more details.
4.2
Control Panel
4.2.1
Overview
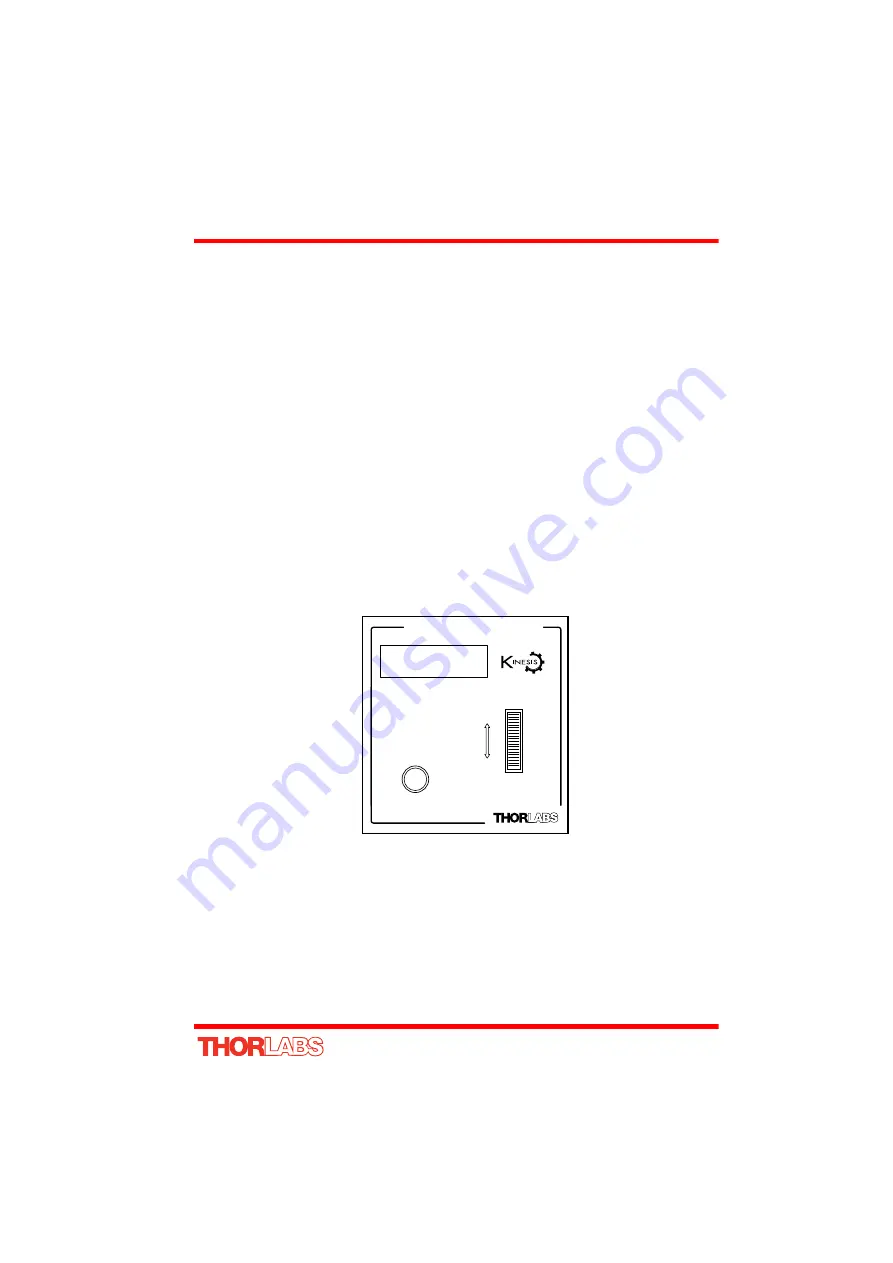
Fig. 4.1 Panel Controls and Indicators
MOVE Controls -
These controls allow all motor moves to be initiated.
Velocity Wheel
- Used to drive the motor at a varying speed in either forward or
reverse directions for full and easy motor control - see Section 4.3.
Digital Display
- The display shows the menu options and settings, accessed via
the menu button - see Section 4.4. When the Ident button on the associated GUI
panel is clicked, the display will flash for a short period.
MENU - used to access the settings menu - see Section 4.4. Also used to stop a
move when the stage is in motion.
Brushed Motor Controller
MENU