











Bluetooth Connections
1. Make sure all devices that your PS4 controller has previously been
paired with are off. This enables the PS4 controller to search for and
connect to your Tele-Op module.
2. Make sure the PS4 controller is off.
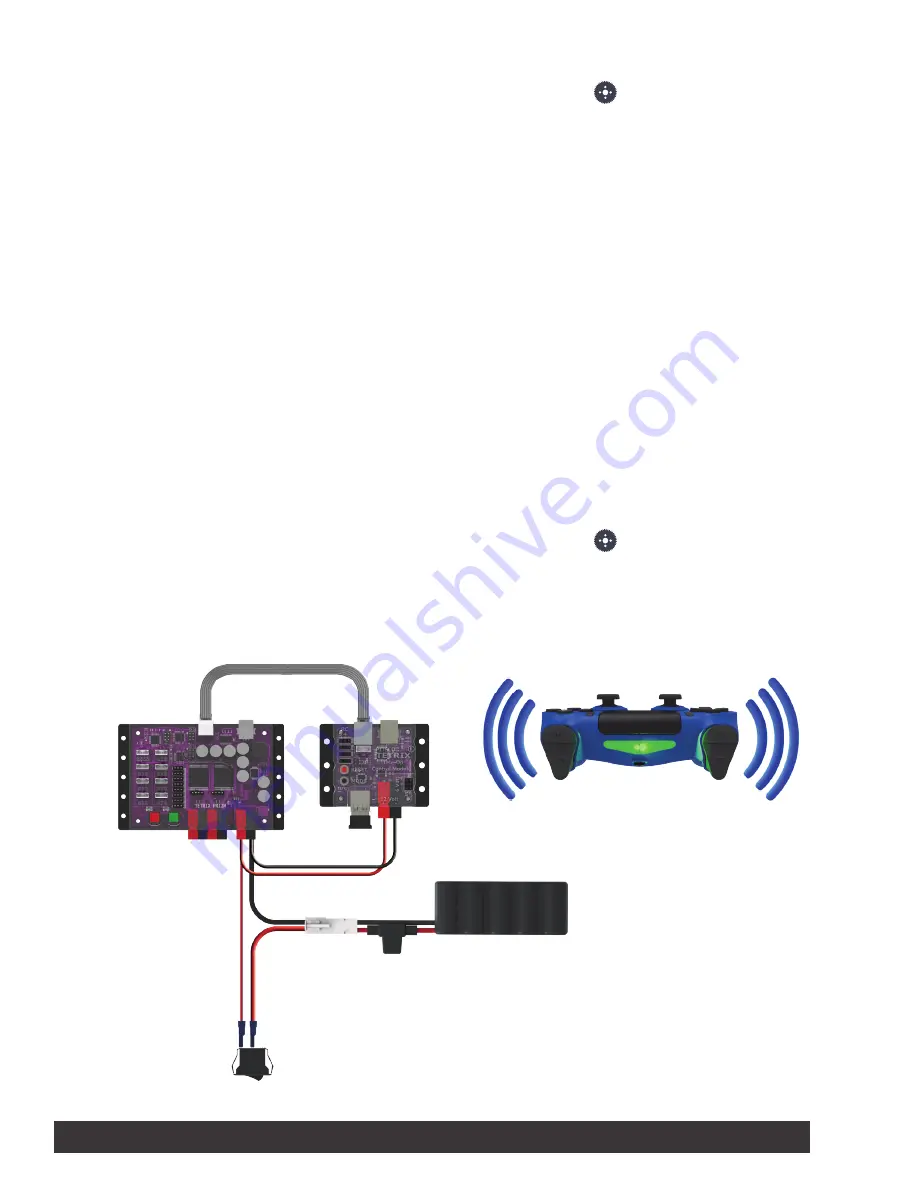
3. Plug the Bluetooth dongle into the Tele-Op module’s USB port.
4. Turn on the PRIZM controller. The PRIZM controller and the Tele-Op
module should both have a blue LED that lights up, indicating they
have power. You should also notice a green flashing LED on the Tele-
Op module, indicating that the Bluetooth dongle is compatible. If
you do not see a green flashing light, then no Bluetooth dongle is
connected or the dongle is not compatible with the Tele-Op module.
Refer to the Tele-Op technical guide for more information on Bluetooth
compatibility.
5. To pair the PS4 controller with the Bluetooth dongle, the controller
must be put into discovery mode. On the PS4 controller, hold down the
Share and the Power buttons at the same time for about five seconds
until you see the controller's light bar flash white in a rapid pattern. The
controller is now in discovery mode.
6. Press the black button on the Tele-Op module. The green LED on the
Tele-Op module should remain on and stop flashing. Also, the light bar
on the game controller should be a solid green color to indicate the
controller is paired and ready to be used to control the Tele-Op module.
7. After the PS4 controller has been paired with the Bluetooth dongle in
the Tele-Op module, you don’t need to go through this process again
unless you want to pair a different device or Bluetooth dongle. Simply
turn on PRIZM and the Tele-Op module and then press the Power
button on the PS4 controller. The controller will automatically connect
to the Bluetooth dongle in the Tele-Op module.
Note: When you connect the PS4
controller to the Tele-Op module,
the game controller pairs with the
Bluetooth dongle that is inserted
into the Tele-Op module’s USB
port. If you remove the dongle
from one Tele-Op module and
plug it into another, the game
controller can now be used
to control the second Tele-Op
module.
Note: When you turn off power
to PRIZM and the Tele-Op
module, the PS4 controller will
automatically turn off after about
10 seconds.
2
TETRIX Tele-Op Control Module Activity 2







































































