


























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
5 1
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
HLFB
M
ODES
:
F
OR
C
LEAR
P
ATH
P
OSITIONING
M
ODES
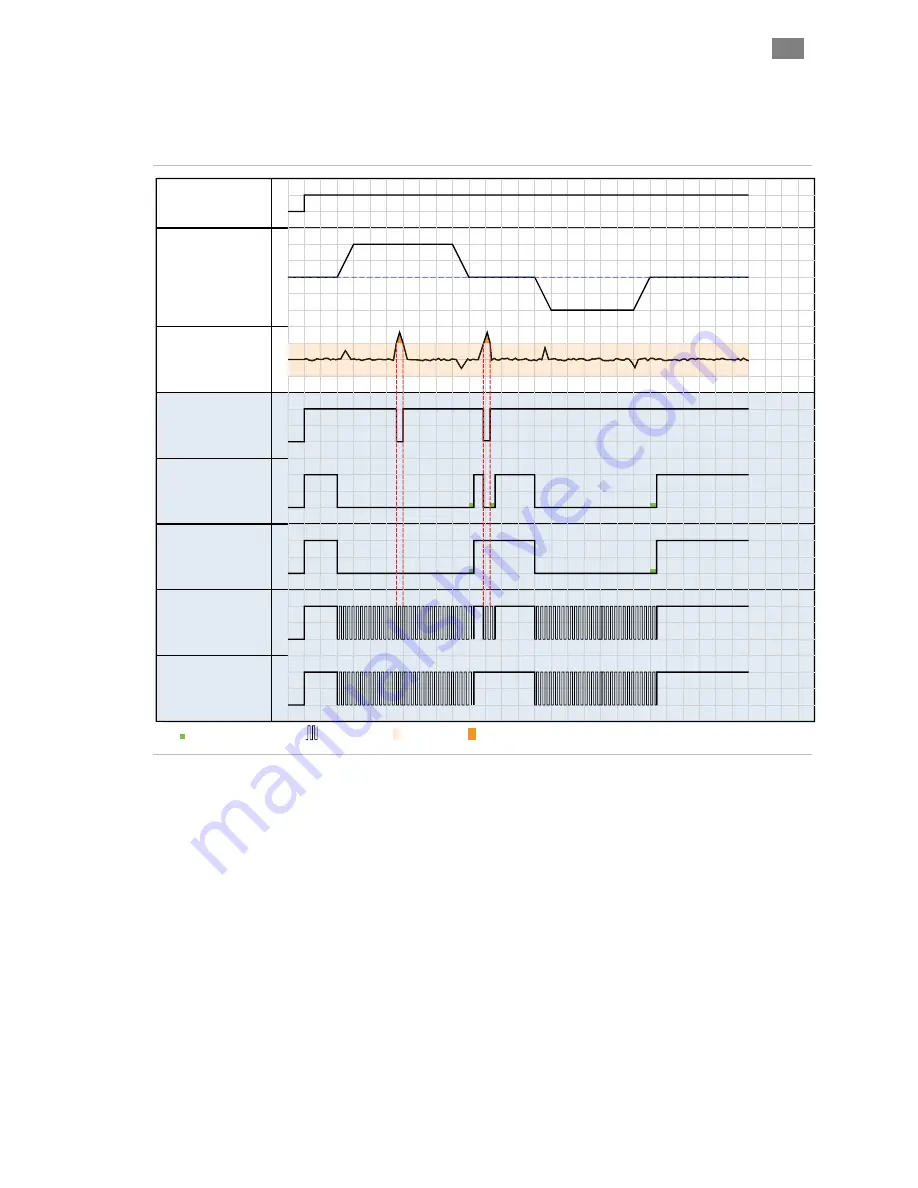
The following HLFB modes are available only in positioning op modes.
.
NOTE: PWM DUTY CYCLE VARIES WITH MEASURED TORQUE
Enable Input
Move Profile
Velocity vs Time
Position Error
in encoder counts
In-Range: Position
(Range: +/- 10 counts)
ASG-Position
ASG-Position
Latched
ASG-Position
w/Measured Torque
ASG-Position, Latched
w/Measured Torque
0
0
0
1
0
1
0
1
0
1
0
-10
+10
1
0
1
v+
v-
Move Done Verify Time
PWM Active
Not in Range
In Range
HLFB Timing: HLFB output modes available only in ClearPath positioning op modes
I
N
R
ANGE
-P
OSITION
The HLFB output asserts (conducts) when the motor is enabled, not
shutdown, and the measured motor position is In Range (
±
X encoder
counts) of the current commanded position. The In Range parameters are
set in the HLFB Setup dialog.
ASG
(A
LL
S
YSTEMS
G
O
)
-
P
OSITION
In ASG-Position mode the HLFB output asserts (conducts) when the
motor is enabled, not in a shutdown, and is considered "Move Done"
(explained below).
"Move Done"
occurs when the motor has settled within
±
X encoder
counts of the final target position, for at least Y milliseconds (where X and
Y are user-settable in the HLFB Setup dialog).







































































