





























Version EN 2018/09 (rev. 1.1)
Lift Stand
User manual
17
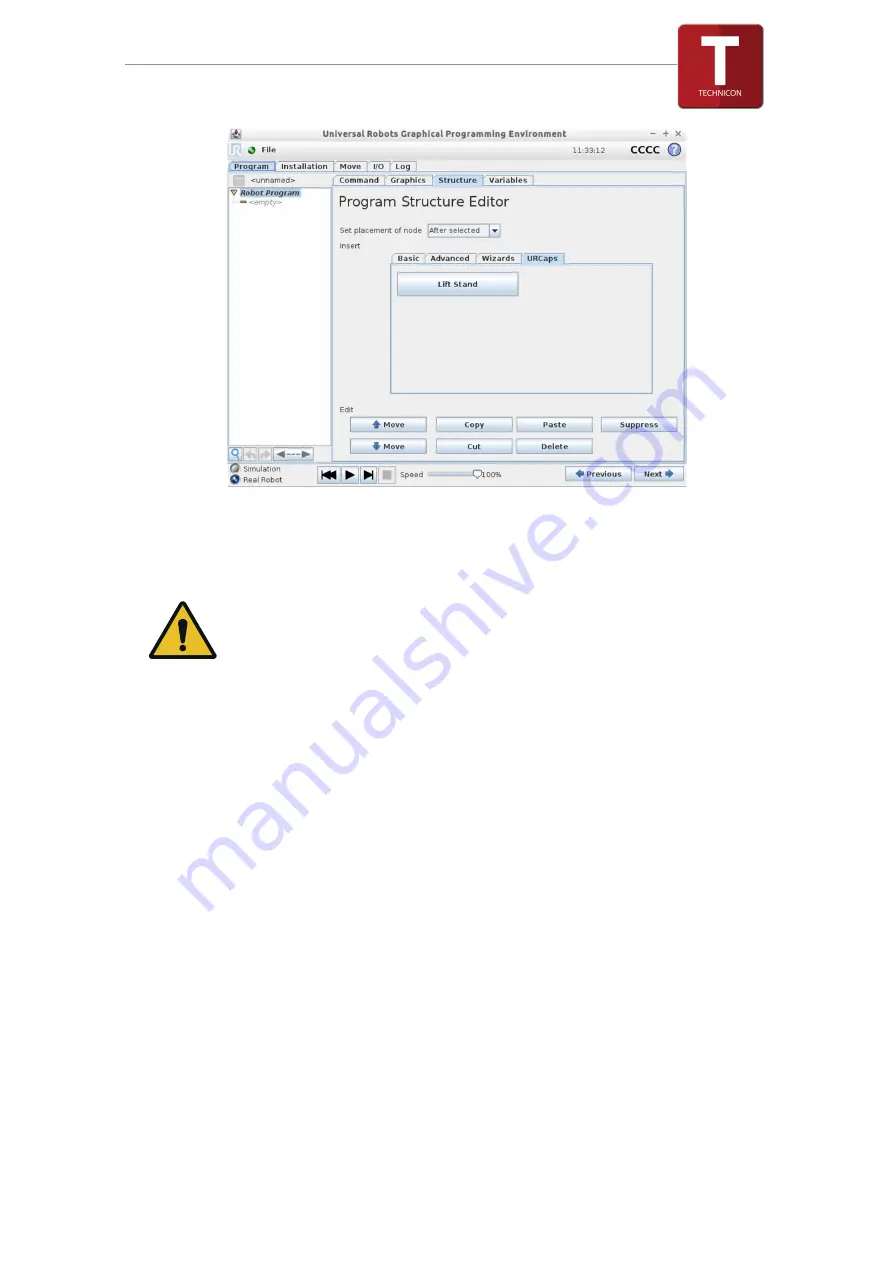
Figure 5.5 How the LiftStand URCap is found under “Structure”
By pressing the LiftStand, a LiftStand node is inserted under "Robot Program". You
can insert as many nodes as you want. Each of these nodes must be configured
before the application can run.
Danger of injury
Please note that if a LiftStand node is used in a "Thread", the TCP
speed cannot be checked since the LiftStand and the robot can move
at the same time. A "Thread" is found under "Structure"-> "Advanced"
and Allows you to run two program trees asynchronously. This allows
the LiftStand and the robot to move simultaneously, but then it is no
longer possible to control TCP speed.
5.2.1 Control of the LiftStand at fixed values
The choice between the two management methods is selected at the tabs at the
bottom of the application window. Here, fixed value control is selected using the
"Operation through fixed Values" button and the use of a variable with the "Operation
through the use of variables" button. This method allows the operator to efficiently and
quickly control the height of the LiftStand. When selecting this method, the height is
set in the text field "Enter height [mm]:". If you want to test the height before running
the program, press the "Go to Here" button, and the LiftStand will run to the set value
immediately. An example of a program where the LiftStand is controlled with fixed
values can be seen in Figure 5.6.





















































