

















TAROT
@2016 TAROT All Rights Reserved.
7
performance might be influenced. For instance, angle offset might occur when the accelerated
state lasts for a long time.
If you are pursuing a perfect performance, please connect the gimbal and Tarot ZYX-M Flight
Control Module to the DATA/FC channel of gimbal controller through the special cable in
main components pack.
Camera
Connect the camera through GoPro Charging & AV-OUT Cable.
2. Gimbal Working Mode
You should select a three-positioned or two-positioned switch in R/C for working mode. Please connect the
corresponding port of the receiver to CH1/SBUS or CH2 of the gimbal controller. Set RC MAPPING in the assistant
software. For different positions, use endpoint fine tune function to set. Please refer to the MODE Channel section
in assistant software for detailed information.
Attentions:
When the
MODE port is unconnected
, the gimbal can only work in the DEFAULT mode. Moreover, during
flight, if the MODE is unconnected suddenly, the working mode would remain the same before disconnection.
After powering up the gimbal, if
the receiver is unconnected
, it works on DEFAULT MODE.
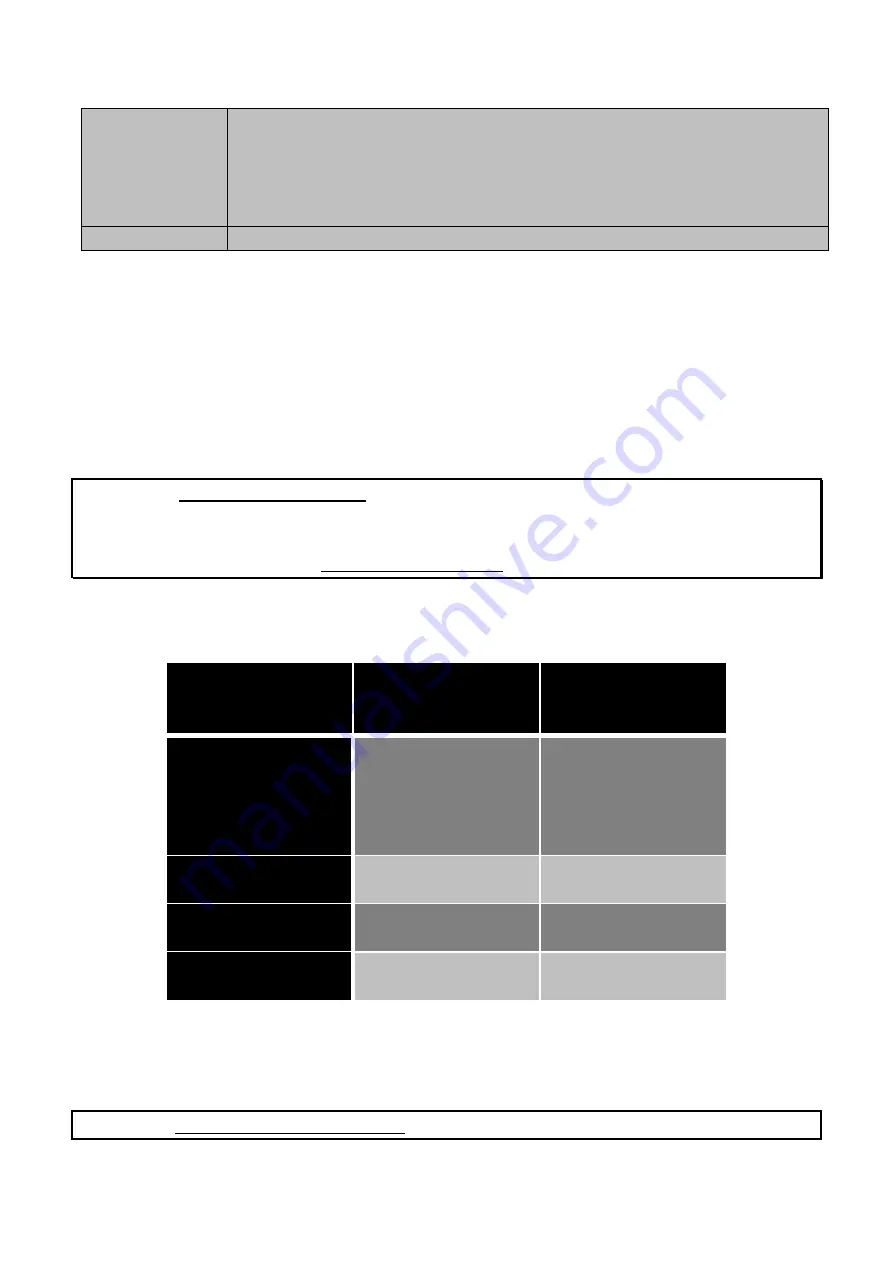
工作模式介绍:
Pan Follow (PF)
Mode
FPV
模式
(
第一人称)
Descriptions
The angles of Roll and
Pitch keep unchanged,
while the angle of Pan axis
changes according to the
head of the multi-rotor.
The angles of Roll,
Pitch and Pan axis change
according to the attitude of
the multi-rotor.
Tx Control
Under Control
Under Control
Attitude Stability
√
√
Vibration Reduction
√
√
2.
Working Mode Setup
Choose a
two-positioned or three-positioned
switch:







































































