




























24
TRIO MP-235 THREE-AXIS MICROMANIPULATOR SYSTEM OPERATION MANUAL – REV. 2.23 (20190130) (FW V2.2 & 2.3)
4.7
Commands
4.7.1
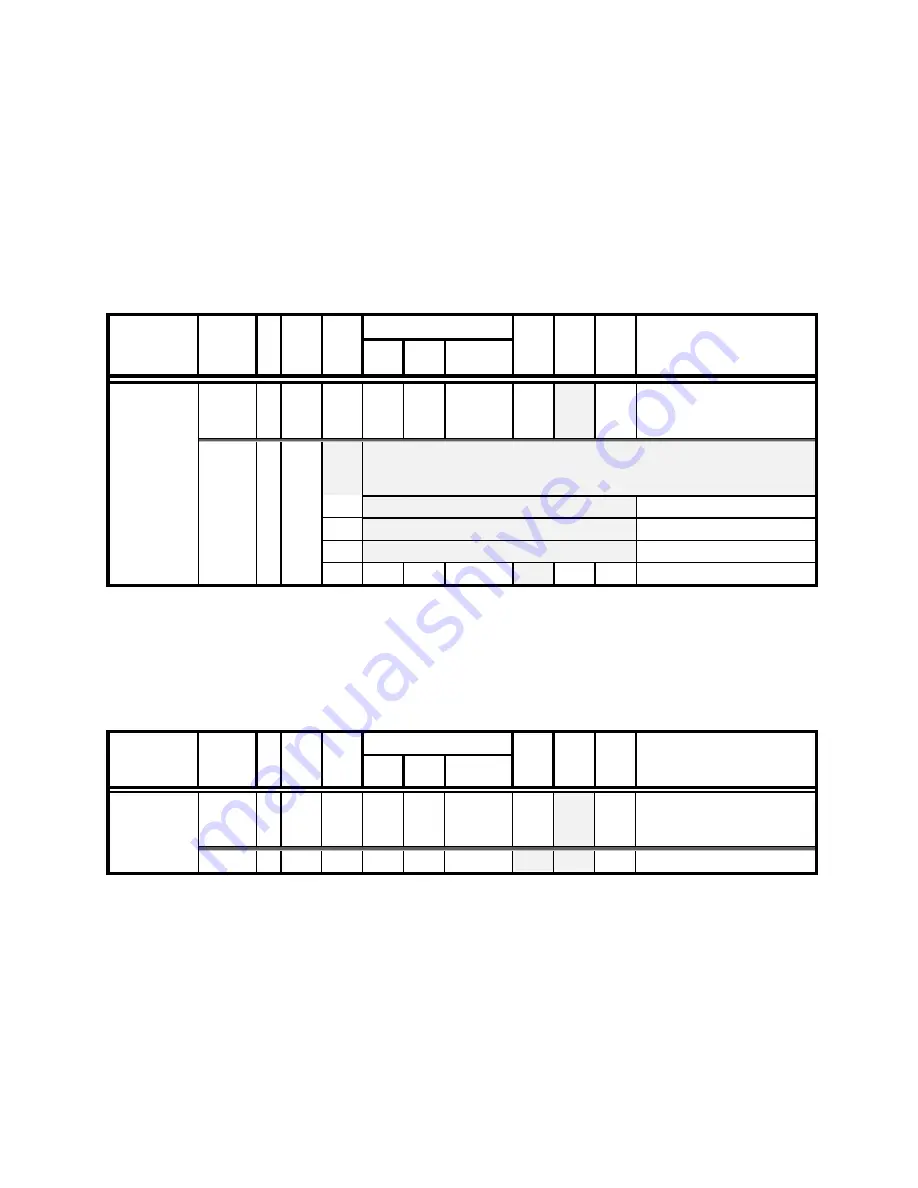
Get Current Position (‘c’ or ‘C’) Command
This command is used to obtain the current position (X, Y, & D coordinates) of the
manipulator. The command sequence consists of one byte as shown in the following table.
Thirteen bytes are returned: X, Y, & D position values in microsteps (4 bytes each), and
completion indicator (1 byte).
Table 4-4. Get Current Position command.
Value
Command Tx/-
Delay/-
Rx
Ver
.
Total
Bytes
Byte
Offset
(Len.) Dec. Hex. Binary
Alt-
key-
pad #
Ctrl-
char
ASCII
def./-
char.
Description
Tx
All
1 0 99
or
67
63
or
43
0110 0011
or
0100 0011
0099
or
0043
‘c’
or
‘C’
Returns the current
positions (
μ
steps) of X, Y, &
D axes
Get Current
Position and
Angle (‘c’ or
‘C’)
Rx.
All
14
Three 4-byte (32-bit) values (current positions in
μ
steps of X, Y, & D), +
1 byte for completion indicator. See Ranges table for minimum and
maximum values.
0
(4)
X pos. in
μ
steps
4
(4)
Y pos. in
μ
steps
8
(4)
D pos. in
μ
steps
12
13 0D
0000
1101
^M
<CR>
Completion indicator
4.7.2
Move to Controller-Defined HOME Position (‘h’) Command
This command moves to the position last defined by the HOME key. Movement is equivalent
to pressing the HOME key (D first, followed by X & Y together, as if moving away from a
work position).
Table 4-5. Move to controller-defined HOME position (‘h’) command.
Value
Command
Tx/-
Delay/-
Rx
Ver
.
Total
Bytes
Byte
Offset
(Len.)
Dec. Hex. Binary
Alt-
key-
pad #
Ctrl-
char
ASCII
def./-
char.
Description
Tx
1 0 104 68
0110
1000 0104
‘h’
Moves to the position saved
for the controller’s HOME
button.
Move to
HOME
Position (‘h’)
Rx
1 0 13 0D
0000
1101
<CR>
Completion indicator
4.7.3
Move to Controller-Defined WORK Position (‘w’) Command
This command moves to the position defined last defined for the WORK key. Movement is
equivalent to pressing the WORK key (X & Y together first, followed by Z, as if moving
towards a work position).







































































