


























Assembly
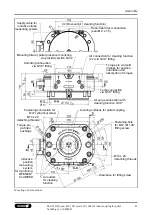
6.4 Coupling Interface
The NSR maxi 220 robot coupling has two different alignment aids
for the PKL pallet coupling.
The mounting interface for the clamping pallet is identical for both
versions of the pallet couplings.
Torque pin version I
Here, the pallet coupling is aligned with the robot module using
the slanted contact surfaces. The wedge slants on the pallet
coupling center precisely with the machining contour of the robot
module during assembly.
Note:
The PKL maxi 220 pallet coupling can only be coupled using
torque pin version I.
Torque pin version II
The pallet coupling engages in the fitted bushings of the robot
module using alignment pins during joining.
Control function
for presence of pallet
coupling via inductive
proximity switch NI 32
Torque pin variant I
Pallet coupling
PKL maxi 220
ID No. 0471950
Clamping pallet
Air ducts for
cleaning function
Torque pin variant I
Position orientation and
torque support through
self-centering mold inclines
Air connections for cleaning function
via G1/8" screw connection
(control also possible on base side)
Torque pin variant II
Torque pin variant II Position
orientation and torque support
through alignment pins
and fitted bushings
Sunk 1 mm deep
Torque pin version I and version II
25
09.00 | NSR maxi 220 / PKL maxi 220 | VERO-S robot coupling for pallet
handling | en | 0489051







































































