














R60-AL User Manual
Rtelligent.cn
-
6
-
3.2.1 PUL
、
DIR(IN1
,
IN2) port
:
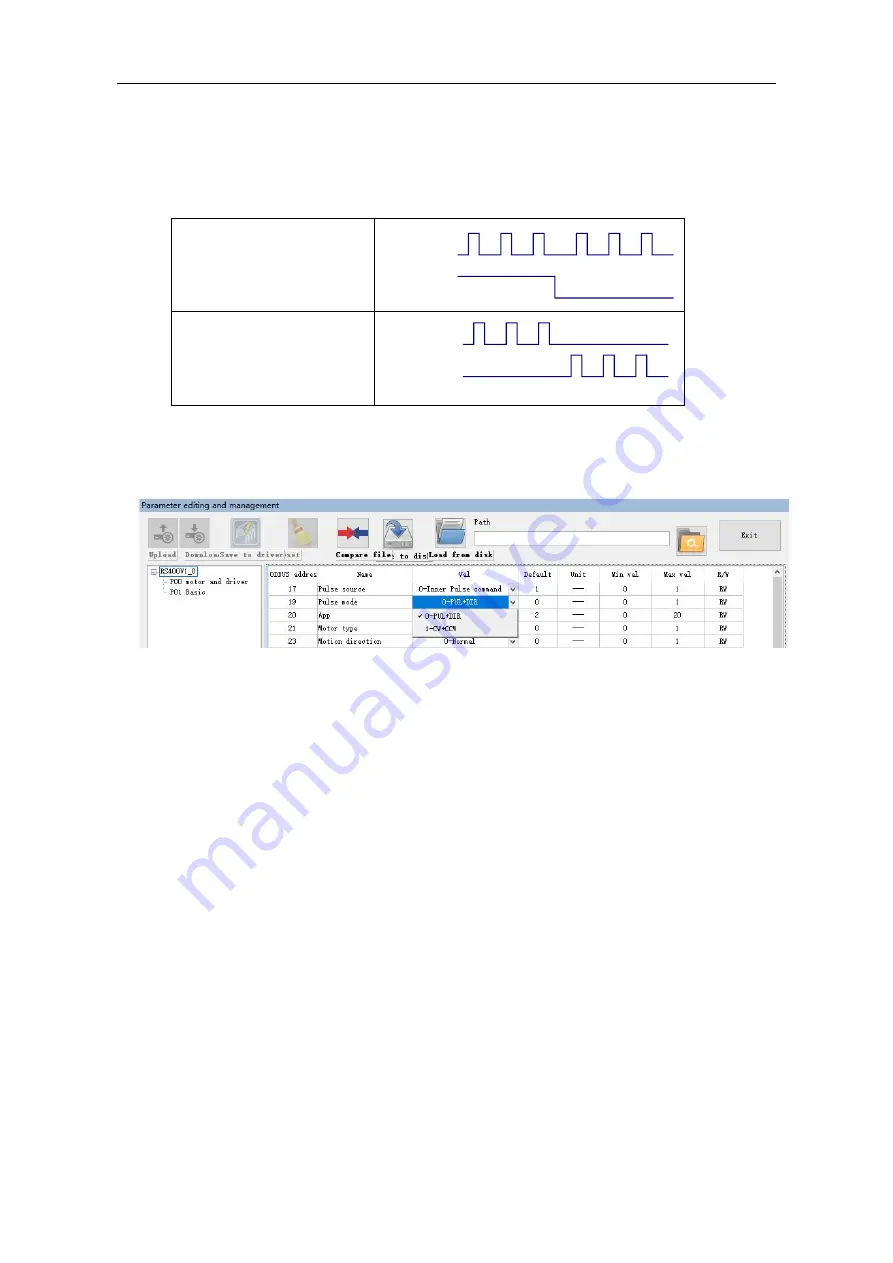
When working in external pulse command mode by default, R60-AL can receive two pulse
command signals: PUL + DIR, CW + CCW.
External pulse command form through debugging software
脉冲
&
方向(
PUL +
DIR
)
PUL
DIR
Forward
Reverse
双脉冲(
CW +CCW
)
PUL
DIR
Forward
Reverse







































































