





























A4
US
US
A4
US
A4
US
A4
A4
US
US
A4
US
A4
A4
US
IQ3 Full Configuration Manual – Section: Settings
17
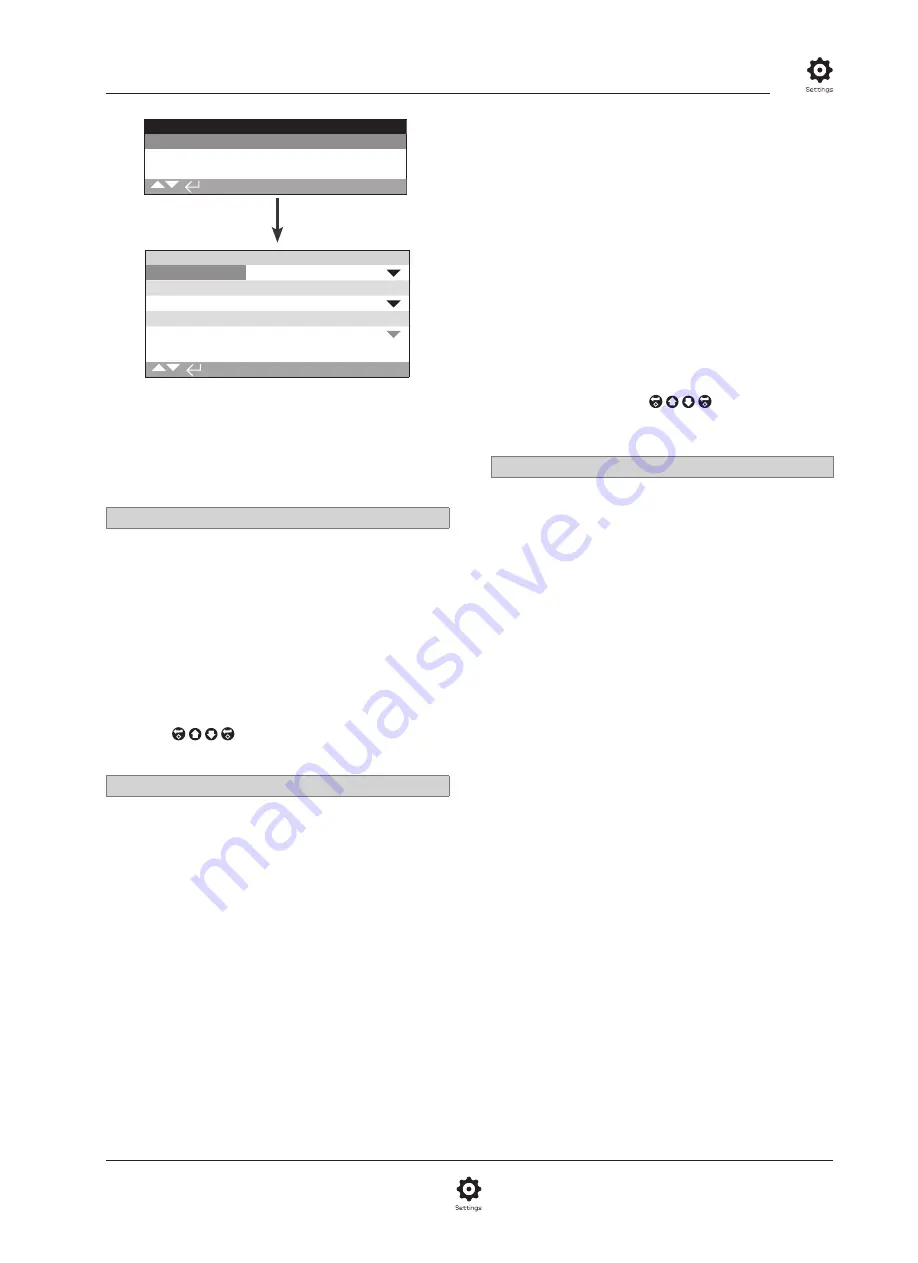
2.3.2-1 Control – Remote – Hardwired
Remote Control
Hardwired
Control Source
Partial Stroke
Remote Control
2-Wire Priority
Stop
Interlocks
Mode
Disabled
Motor Enable
Motor Enable
Disabled
1/3
Hardwired Control is a standard feature. The default
settings are shown above.
Hardwired Control is a standard remote control form
available on all actuators. It allows settings for hardwired
2-wire priority control and interlocks.
1/3
2-Wire Priority
Sets the action the actuator perform when a close and open
signal are applied simultaneously. Hardwired remote control
form C uses the priority action (open or closed) to set the
actuator response when 2 signals are applied. Refer to the
wiring diagram and its referenced RWS control diagram.
On applying hardwired close and open signals together, the
actuator will:
Open
– The actuator will move open.
Stop (default)
– The actuator will not move, or will stop if running.
Close
– The actuator will move closed.
To change, . The drop down list will close and
the selected 2-wire control mode will be indicated.
2/3
Interlocks
Sets the mode for the interlock inputs, refer to wiring diagram.
External interlocks can be used to prevent operation of the
actuator until a certain process condition is met. An example is a
main and bypass valve system. The main valve is interlocked with
the bypass valve such that it cannot be opened until the bypass
valve is fully open.
Disabled (default)
– The interlock inputs are disabled,
interlocking is not available.
Enabled
– Close and open interlock inputs are enabled,
interlocking is available and will be active in both local and
remote control. The actuator will not run in local or remote
control unless interlock signals are applied to the closed or the
open interlock input. If only one interlock is required, for example
an interlock to prevent closed operation, the open interlock must
be linked out.
Conditional
– Close and open interlock inputs are enabled,
interlocking is available and will be active
in remote control
only.
The actuator will not run under remote control unless
interlock signals are applied to the closed control and closed
interlock input or the open control and open interlock input.
Remote control is conditional on 2 signals being applied
simultaneously and therefore integrity of operation due to
spurious control signals is increased. Local control is available
without interlock inputs.
Partial Stroke
– Partial stroke testing demonstrates the
operational integrity of the valve and actuator by moving them
for a set portion of stroke. A remote "partial stroke" hardwired
signal applied to the open interlock input is used to initiate a
partial stroke test. For setting the partial stroke test parameters,
refer to 2.3.2-3. When set to partial stroke, the closed interlock
is disabled. Partial stroke initiated via a network command (with
a network option fitted), does not require the interlocks to be
configured for partial stroke.
To change the settings use . The drop down
list will close and the selected interlock mode will be
indicated.
3/3
Motor Enable
Sets the remote control maintain function when the motor
enable feature is used. When using motor enable, the maintain
line on terminal 34 becomes the permissive input.
Disabled (default)
– Maintain function is controlled by applying
a signal to terminal 34.
Push to Run
– Remote controls are push to run. On removal of
the remote open or close command, movement will stop.
Maintained
– Remote controls are self maintained so only a
pulse is required. Removal of the remote open or close signal will
not stop operations. To stop movement, you must remove the
motor enabled signal.
Summary of Contents for IQ Multi-Turn
Page 2: ...2...







































































