






















Overview
Operating Manual PMCprimo MC
1003813-EN-03
| 9
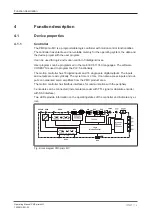
2.2
Front view
X46
USB
CAN1
X45
X43
X44
ECat
RESET
ETH
FUNC
X41
ENC1
STAT
CAN2
X56
ENC2
X55
ENC3
X52
CAN3
X51
CAN4
X50c
X50b
X50a
PB
X40a
X40b
X42
[1]
[5]
[3]
[4]
[2]
[6]
[7]
[8]
[9]
[10]
[11]
[17]
[16]
[15]
[14]
[13]
[12]
Legend
[1]
Type label, on the side of the housing
[2]
Reset button and LEDs to display operating states
[3]
X46, USB interface
[4]
X45, unused
[5]
X44, EtherCAT interface
[6]
X43, Ethernet TCP/IP interface
[7]
X42, CANopen interfaces
[8]
X41, Connection for encoder 1 or in emulation mode: Output encoder
[9]
X40b, Digital inputs and outputs
[10]
X40a, supply voltages for device and encoder on the right-hand side of the device
[11],
[12]
X50a, X50b, Supply voltages for device and encoder on the left-hand side of the
device
[13]
X50c, Digital inputs/outputs
[14]
X51, CANopen/PROFIBUS DP interface







































































