





























Parameters
4.9.7
Servo Algorithm and Other Control Value Corrections
The control value for the drive electronics integrated in the E-871.1A1N and therefore the
system's settling behavior is optimized in closed-loop operation by a PID (proportional-
integral-differential) servo algorithm. Independent of the servo mode, the control value is
also corrected by a notch filter in linear mode.
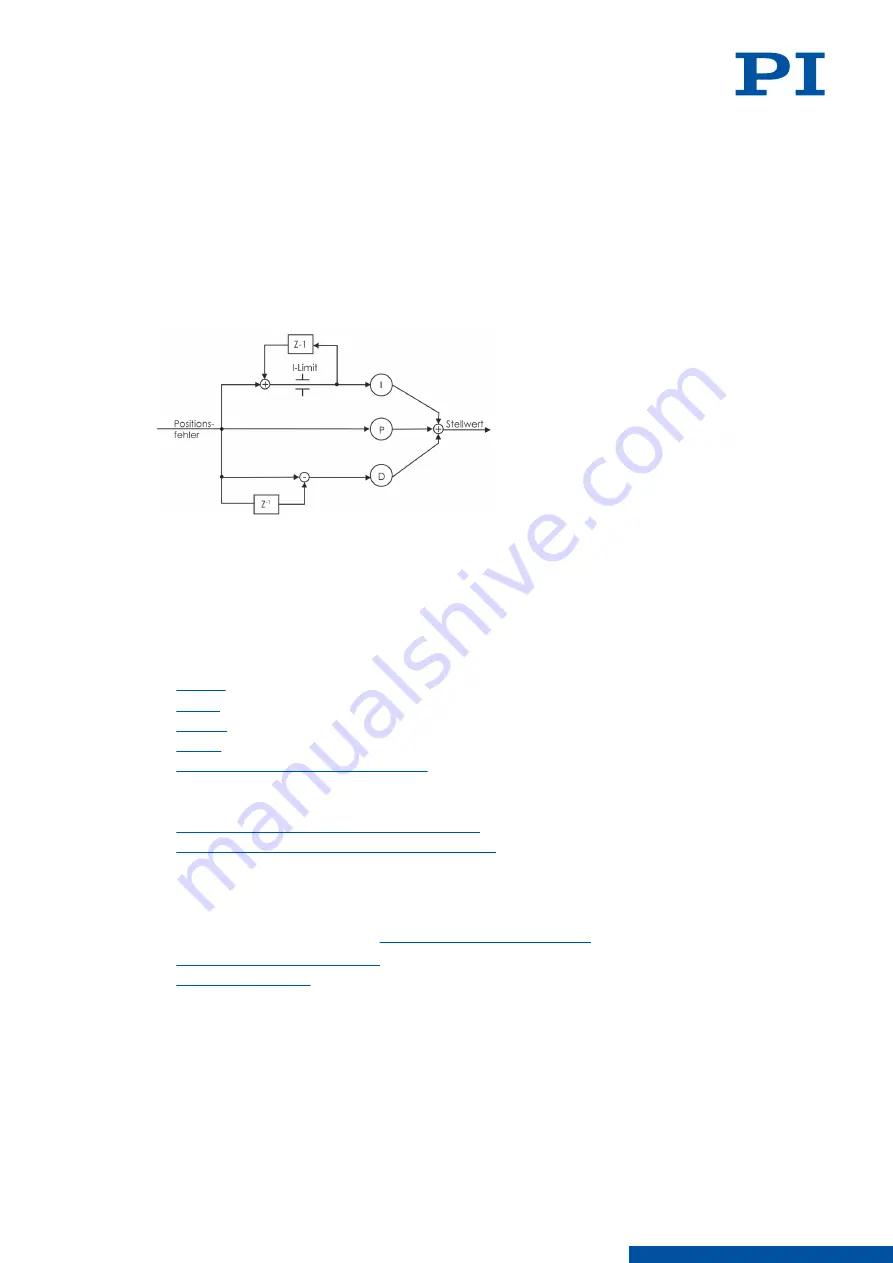
Settings for the servo algorithm
Figure 2: PID algorithm
The control value for the drive electronics integrated in the E-871.1A1N and therefore the
systems' settling behavior is optimized in closed-loop operation by the following corrections:
■
Servo algorithm: The position error that results from the difference between the
commanded position and the actual position (sensor feedback) runs through a PID servo
algorithm.
The servo algorithm uses the following servo control parameters:
■
■
■
D Term (0x3)
■
I-Limit (0x4)
■
D-Term Delay (No. Of Servo Cycles) (0x71)
The input of the servo algorithm can be configured for the E-871.1A1N with the following
parameters:
■
Numerator Of The Servo-Loop Input Factor (0x5A)
■
Denominator Of The Servo-Loop Input Factor (0x5B)
Settings for the Notch Filter
The notch filter corrects the control value in linear mode. The corrections by the notch filter
take place in closed-loop and open-loop operation. The notch filter can be configured with
the following parameters: (see:
Setting the Notch Filter (p. 62)
■
Notch Filter Frequency 1 (Hz) (0x94)
■
Commands
Parameters
4 PRODUCT DESCRIPTION
PZ285EN
‒
1/30/2019
35
M O T I O N | P O S I T I O N I N G